
Mecanismo de cuatro barras
En el estudio de los mecanismos, un Mecanismo de cuatro barras, también llamado cuadrilátero articulado, es el eslabón móvil de cadena cerrada más simple. Consta de cuatro cuerpos, llamados barras o eslabones, conectados en bucle por cuatro nudos. Por lo general, las uniones se configuran de modo que los eslabones se muevan en planos paralelos y el ensamblaje se denomina eslabonamiento plano de cuatro barras. También existen enlaces esféricos y espaciales de cuatro barras y se utilizan en la práctica.
Articulación plana de cuatro barras
Los eslabonamientos planos de cuatro barras se construyen a partir de cuatro eslabones conectados en un lazo por cuatro juntas de un grado de libertad. Una junta puede ser una junta giratoria, también conocida como junta de pasador o junta articulada, denotada por R, o una junta prismática, también conocida como par deslizante, denotada por P.
Un enlace que está fijo en su lugar en relación con el espectador se llama enlace de tierra.Un eslabón que se conecta a tierra mediante una junta giratoria que puede realizar una revolución completa se denomina eslabón de manivela.Un eslabón que se conecta a tierra mediante una articulación giratoria que no puede realizar una revolución completa se denomina eslabón basculante.Un enlace que se conecta a una línea de tierra mediante una junta prismática se llama deslizador. Los deslizadores a veces se consideran manivelas que tienen un pivote articulado a una distancia infinitamente larga, perpendicular al recorrido del deslizador.Un enlace que se conecta a otros dos enlaces se denomina enlace flotante o acoplador. Un acoplador que conecta una manivela y una corredera en un mecanismo de manivela con una sola corredera a menudo se denomina biela; sin embargo, también se ha utilizado para referirse a cualquier tipo de acoplador.
Hay tres tipos básicos de varillaje plano de cuatro barras, dependiendo del uso de articulaciones giratorias o prismáticas:
- Cuatro articulaciones giratorias:se denota como RRRR, construida a partir de cuatro enlaces conectados por cuatro articulaciones giratorias. El enlace de cuadrilátero plano se refiere a todos los arreglos de este tipo.Los ejemplos de vínculos 4R incluyen:
- Varillaje de doble manivela
- Varillaje de manivela-balancín (pedal) (utilizado en gatos de bomba)
- Varillaje de doble balancín (utilizado en la dirección Ackermann)
- Enlaces de paralelogramo (movimiento paralelo) y antiparalelogramo (contraparalelogramo, paralelogramo inverso, mariposa, corbatín)
- Enlaces deltoides (Galloway) y trapecio (Arglin)
- Tres articulaciones giratorias:se denota como RRRP, PRRR, RPRR o RRPR, construida a partir de cuatro enlaces conectados por tres articulaciones giratorias y una articulación prismática. El varillaje de manivela-corredera (RRRP) es un tipo de disposición en el que un eslabón es una manivela, que luego se conecta a una corredera mediante una biela. La manivela-corredera invertida es otro tipo de disposición en la que hay dos manivelas con una corredera que actúa como acoplador.Los ejemplos de vínculos 3R1P incluyen:
- Mecanismo de manivela de un solo deslizador (utilizado en motores de combustión interna)
- Mecanismo de retorno rápido de Whitworth (utilizado en los primeros tipos de moldeadores)
- Mecanismo de retorno rápido de manivela y palanca ranurada (utilizado en moldeadores)
- Mecanismo de pistón fijo (utilizado en bombas manuales)
- Dos articulaciones giratorias y dos articulaciones prismáticas:se denomina PRRP y se construye conectando dos deslizadores con un eslabón acoplador. El control deslizante doblador se refiere a todos los arreglos de este tipo.Los ejemplos de vínculos 2R2P incluyen:
- Trasmallo de Arquímedes (trasmallo elíptico)
- Mecanismo de yugo escocés (eslabón ranurado) (usado en actuadores de válvulas)
- Acoplamiento de Oldham
Los enlaces planos de cuatro barras se pueden diseñar para guiar una amplia variedad de movimientos y, a menudo, son los mecanismos básicos que se encuentran en muchas máquinas. Debido a esto, la cinemática y la dinámica de los eslabonamientos planos de cuatro barras también son temas importantes en la ingeniería mecánica.
Enlace cuadrilátero planar
El enlace de cuadrilátero planar, los enlaces RRRR o 4R tienen cuatro juntas giratorias. Un eslabón de la cadena suele ser fijo y se denomina eslabón de tierra, eslabón fijo o marco. Los dos enlaces conectados a la estructura se denominan enlaces a tierra y generalmente son los enlaces de entrada y salida del sistema, a veces llamados enlace de entrada y enlace de salida. El último eslabón es el eslabón flotante, que también se denomina acoplador o biela porque conecta una entrada con la salida.
Suponiendo que el marco es horizontal, hay cuatro posibilidades para los enlaces de entrada y salida:
- Una manivela: puede girar 360 grados completos
- Un balancín: puede girar a través de un rango limitado de ángulos que no incluye 0° o 180°
- Un balancín 0: puede girar a través de un rango limitado de ángulos que incluye 0° pero no 180°
- Un balancín π: puede girar a través de un rango limitado de ángulos que incluye 180° pero no 0°
Algunos autores no distinguen entre los tipos de balancín.
Condición Grashof
La condición de Grashof para un eslabón de cuatro barras establece: Si la suma del eslabón más corto y el más largo de un eslabón cuadrilátero plano es menor o igual que la suma de los dos eslabones restantes, entonces el eslabón más corto puede girar completamente con respecto a un enlace vecino. En otras palabras, la condición se cumple si S + L ≤ P + Q, donde S es el enlace más corto, L es el más largo y P y Q son los otros enlaces.
Clasificación
El movimiento de un eslabón cuadrilátero se puede clasificar en ocho casos según las dimensiones de sus cuatro eslabones. Sean a, b, g y h las longitudes del cigüeñal de entrada, el cigüeñal de salida, el eslabón de tierra y el eslabón flotante, respectivamente. Entonces, podemos construir los tres términos:


El movimiento de un vínculo cuadrilátero se puede clasificar en ocho tipos según los valores positivos y negativos de estos tres términos, T 1, T 2 y T 3.
 |  |  | Condición Grashof | Enlace de entrada | Enlace de salida |
|---|---|---|---|---|---|
| − | − | + | Grashof | Manivela | Manivela |
| + | + | + | Grashof | Manivela | Balancín |
| + | − | − | Grashof | Balancín | Manivela |
| − | + | − | Grashof | Balancín | Balancín |
| − | − | − | No Grashof | 0-Rocker | 0-Rocker |
| − | + | + | No Grashof | π-Rocker | π-Rocker |
| + | − | + | No Grashof | π-Rocker | 0-Rocker |
| + | + | − | No Grashof | 0-Rocker | π-Rocker |
Los casos de T 1 = 0, T 2 = 0 y T 3 = 0 son interesantes porque los vínculos desaparecen. Si distinguimos el enlace de cuadrilátero plegable, entonces hay 27 casos diferentes.
La figura muestra ejemplos de los diversos casos para un enlace de cuadrilátero plano.

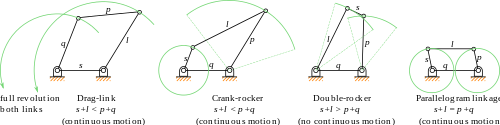 Tipos de enlaces de cuatro barras,
Tipos de enlaces de cuatro barras,
s: enlace más corto,
l: enlace más largo.
La configuración de un eslabonamiento cuadrilátero se puede clasificar en tres tipos: convexa, cóncava y cruzada. En los casos convexo y cóncavo no hay dos enlaces que se crucen entre sí. En el enlace de cruce, dos enlaces se cruzan entre sí. En el caso convexo, los cuatro ángulos internos tienen menos de 180 grados, y en la configuración cóncava, un ángulo interno tiene más de 180 grados. Existe una relación geométrica simple entre las longitudes de las dos diagonales del cuadrilátero. Para eslabonamientos convexos y cruzados, la longitud de una diagonal aumenta si y solo si la otra disminuye. Por otro lado, para enlaces no cruzados no convexos, ocurre lo contrario; una diagonal aumenta si y solo si la otra también aumenta.
Diseño de mecanismos de cuatro barras.
La síntesis, o diseño, de mecanismos de cuatro barras es importante cuando se pretende producir un movimiento de salida deseado para un movimiento de entrada específico. Para minimizar el costo y maximizar la eficiencia, un diseñador elegirá el mecanismo más simple posible para lograr el movimiento deseado. Al seleccionar un tipo de mecanismo a diseñar, las longitudes de enlace deben determinarse mediante un proceso llamado síntesis dimensional. La síntesis dimensional implica una metodología de iteración y análisis que, en determinadas circunstancias, puede ser un proceso ineficiente; sin embargo, en escenarios únicos, es posible que no existan procedimientos exactos y detallados para diseñar un mecanismo preciso.
Relación de tiempo
La relación de tiempo (Q) de un mecanismo de cuatro barras es una medida de su retorno rápido y se define de la siguiente manera:

Con los mecanismos de cuatro barras, hay dos carreras, la de avance y la de retorno, que cuando se suman crean un ciclo. Cada golpe puede ser idéntico o tener diferentes velocidades promedio. La relación de tiempo define numéricamente qué tan rápido se compara el golpe de avance con el golpe de retorno más rápido. El tiempo de ciclo total (Δt ciclo) para un mecanismo es:

La mayoría de los mecanismos de cuatro barras son impulsados por un actuador giratorio o manivela que requiere una velocidad constante específica. Esta velocidad requerida (ω manivela) está relacionada con el tiempo de ciclo de la siguiente manera:

Algunos mecanismos que producen movimiento alternativo o repetitivo están diseñados para producir un movimiento simétrico. Es decir, la carrera de avance de la máquina se mueve al mismo ritmo que la carrera de retorno. Estos mecanismos, que a menudo se denominan diseño en línea, generalmente funcionan en ambas direcciones, ya que ejercen la misma fuerza en ambas direcciones.
Los ejemplos de mecanismos de movimiento simétrico incluyen:
- Limpia parabrisas
- Mecanismos de motor o pistones
- Manivela de ventana de automóvil
Otras aplicaciones requieren que el mecanismo a diseñar tenga una velocidad promedio más rápida en una dirección que en la otra. Esta categoría de mecanismo es la más deseada para el diseño cuando solo se requiere trabajo para operar en una dirección. La velocidad a la que opera esta carrera también es muy importante en ciertas aplicaciones de máquinas. En general, la carrera de retorno y de trabajo no intensivo debe realizarse lo más rápido posible. Esto es para que la mayor parte del tiempo de cada ciclo se dedique a la carrera de trabajo intensivo. Estos mecanismos de retorno rápido a menudo se denominan compensación.
Ejemplos de mecanismos de compensación incluyen:
- Máquinas de corte
- Dispositivos para mover paquetes
Con los mecanismos de compensación, es muy importante comprender cómo y en qué medida la compensación afecta la relación de tiempo. Para relacionar la geometría de un enlace específico con el momento de la carrera, se utiliza un ángulo de desequilibrio (β). Este ángulo está relacionado con la relación de tiempo, Q, de la siguiente manera:

A través de un reordenamiento algebraico simple, esta ecuación se puede reescribir para resolver β:

Gráficos de tiempo
Los diagramas de tiempo se utilizan a menudo para sincronizar el movimiento entre dos o más mecanismos. Muestran gráficamente información que muestra dónde y cuándo cada mecanismo está parado o realizando sus carreras de avance y retorno. Los gráficos de tiempo permiten a los diseñadores describir cualitativamente el comportamiento cinemático requerido de un mecanismo.
Estos gráficos también se utilizan para estimar las velocidades y aceleraciones de ciertos enlaces de cuatro barras. La velocidad de un enlace es la tasa de tiempo a la que cambia su posición, mientras que la aceleración del enlace es la tasa de tiempo a la que cambia su velocidad. Tanto la velocidad como la aceleración son cantidades vectoriales, en el sentido de que tienen tanto magnitud como dirección; sin embargo, solo sus magnitudes se utilizan en los gráficos de tiempo. Cuando se usa con dos mecanismos, los diagramas de tiempo asumen una aceleración constante. Esta suposición produce ecuaciones polinómicas para la velocidad en función del tiempo. La aceleración constante permite que el gráfico de velocidad vs. tiempo aparezca como líneas rectas, designando así una relación entre el desplazamiento (ΔR), la velocidad máxima (v pico), aceleración (a) y tiempo (Δt). Las siguientes ecuaciones muestran esto.Δ R =1/2v pico Δ tΔ R =1/4un (Δt)
Dado el desplazamiento y el tiempo, se pueden calcular tanto la velocidad máxima como la aceleración de cada mecanismo en un par dado.
Varillaje de manivela deslizante
Un varillaje de manivela deslizante es un varillaje de cuatro barras con tres articulaciones giratorias y una articulación prismática o deslizante. La rotación de la manivela impulsa el movimiento lineal de la corredera, o la expansión de los gases contra un pistón deslizante en un cilindro puede impulsar la rotación de la manivela.
Hay dos tipos de manivelas deslizantes: en línea y desplazadas.En líneaUn deslizador-manivela en línea tiene su deslizador posicionado de manera que la línea de recorrido de la junta articulada del deslizador pasa a través de la junta base de la manivela. Esto crea un movimiento deslizante simétrico hacia adelante y hacia atrás a medida que gira la manivela.CompensarSi la línea de recorrido de la junta articulada de la corredera no pasa por el pivote base de la manivela, el movimiento de la corredera no es simétrico. Se mueve más rápido en una dirección que en la otra. Esto se llama un mecanismo de retorno rápido.
Enlaces esféricos y espaciales de cuatro barras
Si el eslabón tiene cuatro juntas articuladas con ejes en ángulo para intersecarse en un solo punto, entonces los eslabones se mueven sobre esferas concéntricas y el conjunto se llama eslabón esférico de cuatro barras. Las ecuaciones de entrada-salida de un enlace esférico de cuatro barras se pueden aplicar a enlaces espaciales de cuatro barras cuando las variables se reemplazan por números duales.
El enlace de Bennett es un enlace espacial de cuatro barras con juntas articuladas que tienen sus ejes en ángulo de una manera particular que hace que el sistema sea móvil.
 Junta universal.
Junta universal. Dirección del tractor
Dirección del tractor Varillaje Bennett de cuatro barras.
Varillaje Bennett de cuatro barras.
Ejemplos
Otros vínculos y mecanismos
- vinculación de Chebyshev
- Acoplamiento lambda de Chebyshev
- Enlace Evans "Saltamontes"
- enlace de Hoecken
- Articulación de cabeza de caballo
- Pantógrafo
- enlace de roberts
- Engranaje de válvula
- enlace de Watt
Aplicaciones
- Suspensión de bicicleta
- Vínculos biológicos
- Suspensión de doble horquilla
- Cierra puertas
- Escalones plegables y sillas plegables
- Máquinas de pie (muela, torno, máquina de coser, pedal, etc.)
- Palanca de cambios
- Planeador (muebles)
- Ventilador oscilante
- Bomba extractora
- Papelera de paso
- Limpiaparabrisas
 Gato de bomba de pozo de petróleo.
Gato de bomba de pozo de petróleo. Suspensión de trenes usando el varillaje de Watt.
Suspensión de trenes usando el varillaje de Watt. Suspensión trasera del automóvil mediante varillaje de Watt.
Suspensión trasera del automóvil mediante varillaje de Watt. Suspensión para vehículos blindados de la familia VPK-3927 Volk.
Suspensión para vehículos blindados de la familia VPK-3927 Volk. Mecanismo de cierre de puerta.
Mecanismo de cierre de puerta. La máquina de coser Howe Machine Co.
La máquina de coser Howe Machine Co. Una piedra de afilar accionada por pedal.
Una piedra de afilar accionada por pedal. El torno de pedal de corte con tornillos Brown Bros.
El torno de pedal de corte con tornillos Brown Bros. Transmisión de sobremarcha Ford de 3 velocidades
Transmisión de sobremarcha Ford de 3 velocidades Cambio de marchas en una motocicleta SV650S de 2003.
Cambio de marchas en una motocicleta SV650S de 2003. Una silla plegable.
Una silla plegable. Un diagrama de la suspensión en una bicicleta de montaña Specialized Stumpjumper FSR.
Un diagrama de la suspensión en una bicicleta de montaña Specialized Stumpjumper FSR. Animación de una locomotora a vapor.
Animación de una locomotora a vapor.
Simulaciones
 Crank-Rocker Varillaje de 4 barras: Eleslabón cian completa una revolución completaEl eslabón verde se mece hacia adelante y hacia atrás.
Crank-Rocker Varillaje de 4 barras: Eleslabón cian completa una revolución completaEl eslabón verde se mece hacia adelante y hacia atrás. Varillaje de 4 barras de manivela doble Eleslabón cian completa una revolución completaEl eslabón verde completa una revolución completa.
Varillaje de 4 barras de manivela doble Eleslabón cian completa una revolución completaEl eslabón verde completa una revolución completa. Varillaje de 4 barras de balancín doble:el eslabón amarillo y el eslabón verde se balancean hacia adelante y hacia atrás.
Varillaje de 4 barras de balancín doble:el eslabón amarillo y el eslabón verde se balancean hacia adelante y hacia atrás. Vínculos de 4 barras en paralelogramo y antiparalelogramo:(Demostración de la condición de cambio de punto en el medio)
Vínculos de 4 barras en paralelogramo y antiparalelogramo:(Demostración de la condición de cambio de punto en el medio) Vínculos de 4 barras de paralelogramo y antiparalelogramo (inversiones):(Demostración de la condición de cambio de punto en el medio)
Vínculos de 4 barras de paralelogramo y antiparalelogramo (inversiones):(Demostración de la condición de cambio de punto en el medio) Deltoides/Kite (Galloway) Varillaje de 4 barras:Se muestran ambas inversiones:• Crank-Rocker• Double-Crank
Deltoides/Kite (Galloway) Varillaje de 4 barras:Se muestran ambas inversiones:• Crank-Rocker• Double-Crank Trapecio (Arglin) Varillaje de 4 barras: Semuestran las cuatro inversiones únicas:• Crank-Rocker• Crank-Rocker• Double-Crank• Double-Rocker
Trapecio (Arglin) Varillaje de 4 barras: Semuestran las cuatro inversiones únicas:• Crank-Rocker• Crank-Rocker• Double-Crank• Double-Rocker
 Centrodes fijos y móviles dibujados en un enlace de doble manivela de 4 barras.
Centrodes fijos y móviles dibujados en un enlace de doble manivela de 4 barras. Acoplador cognados de un varillaje Crank-Rocker de 4 barras.
Acoplador cognados de un varillaje Crank-Rocker de 4 barras. Varillaje de dirección Ackermann, que utiliza un varillaje de doble balancín de 4 barras.
Varillaje de dirección Ackermann, que utiliza un varillaje de doble balancín de 4 barras. Enlace de cuatro barras para aproximar
Enlace de cuatro barras para aproximar .
Contenido relacionado
Teoría del control
Principio de d'Alembert
Historia de la ingeniería en sistemas