
Ecuación paramétrica
En matemáticas, una ecuación paramétrica define un grupo de cantidades como funciones de una o más variables independientes llamadas parámetros. Las ecuaciones paramétricas se utilizan comúnmente para expresar las coordenadas de los puntos que forman un objeto geométrico como una curva o una superficie, llamada curva paramétrica y superficie paramétrica, respectivamente. En tales casos, las ecuaciones se denominan colectivamente representación paramétrica, sistema paramétrico o parametrización (alternativamente escrito como parametrización). b>) del objeto.
Por ejemplo, las ecuaciones


Las representaciones paramétricas generalmente no son únicas (consulte la sección "Ejemplos en dos dimensiones" a continuación), por lo que las mismas cantidades pueden expresarse mediante varias parametrizaciones diferentes.
Además de curvas y superficies, las ecuaciones paramétricas pueden describir variedades y variedades algebraicas de dimensión superior, siendo el número de parámetros igual a la dimensión de la variedad o variedad, y el número de ecuaciones igual a la dimensión de la espacio en el que se considera la variedad o variedad (para curvas la dimensión es uno y se utiliza el parámetro uno, para superficies dimensión dos y dos parámetros, etc.).
Las ecuaciones paramétricas se utilizan comúnmente en cinemática, donde la trayectoria de un objeto se representa mediante ecuaciones que dependen del tiempo como parámetro. Debido a esta aplicación, un único parámetro suele estar etiquetado como t; sin embargo, los parámetros pueden representar otras cantidades físicas (como variables geométricas) o pueden seleccionarse arbitrariamente por conveniencia. Las parametrizaciones no son únicas; más de un conjunto de ecuaciones paramétricas pueden especificar la misma curva.
Aplicaciones
Cinemática
En cinemática, los objetos' Los caminos a través del espacio se describen comúnmente como curvas paramétricas, y cada coordenada espacial depende explícitamente de un parámetro independiente (generalmente el tiempo). Utilizado de esta manera, el conjunto de ecuaciones paramétricas para las coordenadas del objeto constituyen colectivamente una función de posición con valor vectorial. Estas curvas paramétricas pueden luego integrarse y diferenciarse terminológicamente. Por lo tanto, si la posición de una partícula se describe paramétricamente como

entonces su velocidad se puede encontrar como

y su aceleración como

Diseño asistido por ordenador
Otro uso importante de las ecuaciones paramétricas es en el campo del diseño asistido por computadora (CAD). Por ejemplo, considere las siguientes tres representaciones, todas las cuales se usan comúnmente para describir curvas planas.
| Tipo | Formulario | Ejemplo | Descripción |
|---|---|---|---|
| Explicit | Línea | ||
| Implícito | Circle | ||
| Paramétrica | Línea | ||
| Circle |










Cada representación tiene ventajas y desventajas para aplicaciones CAD.
La representación explícita puede ser muy complicada, o incluso puede no existir. Además, no se comporta bien bajo transformaciones geométricas, y en particular bajo rotaciones. Por otra parte, como una ecuación paramétrica y una ecuación implícita pueden fácilmente deducirse de una representación explícita, cuando existe una simple representación explícita, tiene las ventajas de ambas representaciones.
Las representaciones implícitas pueden dificultar la generación de puntos en la curva, e incluso decidir si hay puntos reales. Por otro lado, son muy adecuados para decidir si un punto determinado está en una curva, o si está dentro o fuera de una curva cerrada.
Estas decisiones pueden resultar difíciles con una representación paramétrica, pero las representaciones paramétricas son más adecuadas para generar puntos en una curva y trazarla.
Geometría entera
Numerosos problemas de geometría entera se pueden resolver utilizando ecuaciones paramétricas. Una solución clásica de este tipo es la parametrización de triángulos rectángulos de Euclides de modo que las longitudes de sus lados a, b y su hipotenusa c son números enteros coprimos. Como a y b ambos no son pares (de lo contrario, a, b y c no sería coprime), uno puede intercambiarlos para que tengan a par, y entonces la parametrización es

donde los parámetros m y n son números enteros coprimos positivos que no son ambos impares.
Multiplicando a, b y c mediante un número entero positivo arbitrario, se obtiene una parametrización de todos los triángulos rectángulos cuyos tres lados tienen longitudes enteras.
Implicitización
Convertir un conjunto de ecuaciones paramétricas en una sola ecuación implícita implica eliminar la variable t de las ecuaciones simultáneas Este proceso se llama implícita. Si una de estas ecuaciones se puede resolver para t, la expresión obtenida puede ser sustituida en la otra ecuación para obtener una ecuación que implica x y Sí. sólo: Resolver para obtener y usar esto en da la ecuación explícita mientras que los casos más complicados darán una ecuación implícita de la forma






Si la parametrización es dada por funciones racionales

donde p, q< /span> y r son polinomios coprimos conjuntos, un cálculo resultante permite implícitamente. Más precisamente, la ecuación implícita es la resultante con respecto a t de xr(t) – p(t) y año(t) – q(t).
En dimensiones superiores (ya sea más de dos coordenadas o más de un parámetro), la implícitación de ecuaciones paramétricas racionales puede realizarse con el cálculo de bases de Gröbner; ver base de Gröbner § Implicitización en dimensión superior.
Para tomar el ejemplo del círculo de radio a, las ecuaciones paramétricas

puede ser implícita en términos de x y Sí. por medio de la identidad trigonométrica pitagórica. Con




que es la ecuación estándar de un círculo centrado en el origen.
Ejemplos en dos dimensiones
Parábola
La ecuación más simple para una parábola,

puede ser (trivialmente) parametrizado utilizando un parámetro libre t, y el ajuste

Ecuaciones explícitas
Más generalmente, cualquier curva dada por una ecuación explícita

se puede parametrizar (trivialmente) utilizando un parámetro libre t y estableciendo

Círculo
Un ejemplo más sofisticado es el siguiente. Considere el círculo unitario que se describe mediante la ecuación ordinaria (cartesiana)

Esta ecuación se puede parametrizar de la siguiente manera:

Con la ecuación cartesiana es más fácil comprobar si un punto se encuentra en la circunferencia o no. Con la versión paramétrica es más fácil obtener puntos en un gráfico.
En algunos contextos, si existen, se prefieren las ecuaciones paramétricas que involucran solo funciones racionales (es decir, fracciones de dos polinomios). En el caso del círculo, dicha parametrización racional es

Con este par de ecuaciones paramétricas, el punto (−1, 0) no está representado por un valor real de t, pero por el límite de x y y cuando t tiende al infinito.
Elipse
Una elipse en posición canónica (centro en el origen, eje mayor a lo largo del eje x) con semiejes a y b se pueden representar paramétricamente como

Una elipse en posición general se puede expresar como

como parámetro t varía de 0 a 2π. Aquí (Xc Yc) es el centro de la elipse, y φ es el ángulo entre el x-eje y el eje mayor de la elipse.
Ambas parametrizaciones pueden ser racionalizadas utilizando la fórmula de medio triángulo tangente y estableciendo

Curva lisa

Una curva lisa es similar a una elipse, pero la x y Sí. los sinusoides no están en fase. En posición canónica, una curva lisa es dada por

donde kx y ky son constantes que describen el número de lóbulos de la figura.
Hiperbola
Una hipérbola con apertura este-oeste se puede representar paramétricamente mediante

o, racionalmente

Una hipérbola con apertura norte-sur se puede representar paramétricamente como

o, racionalmente

En todas estas fórmulas (h k) son las coordenadas centrales de la hipérbola, a es la longitud del semieje mayor y b es la longitud del semieje menor. Tenga en cuenta que en las formas racionales de estas fórmulas, los puntos (−a 0) y (0 −a), respectivamente, no están representados por un valor real de t, pero son los límite de x y y ya que t tiende al infinito.
Hipotrocoide
Un hipotrocoide es una curva trazada por un punto unido a un círculo de radio r que gira alrededor del interior de un círculo fijo. de radio R, donde el punto está a una distancia d desde el centro del círculo interior.
 Una hipotrocoidea para la cual r = d
Una hipotrocoidea para la cual r = d Una hipotrocoidea para la cual R = 5, r = 3, d = 5
Una hipotrocoidea para la cual R = 5, r = 3, d = 5


Las ecuaciones paramétricas para las hipotrocoides son:

Algunos ejemplos:
 R = 6 r = 4 d = 1
R = 6 r = 4 d = 1 R = 7 r = 4 d = 1
R = 7 r = 4 d = 1 R = 8 r = 3 d = 2
R = 8 r = 3 d = 2 R = 7 r = 4 d = 2
R = 7 r = 4 d = 2 R = 15 r = 14 d = 1
R = 15 r = 14 d = 1





Ejemplos en tres dimensiones
Hélice

Las ecuaciones paramétricas son convenientes para describir curvas en espacios de dimensiones superiores. Por ejemplo:

describe una curva tridimensional, la hélice, con un radio de a y que se eleva en 2πb unidades por turno. Las ecuaciones son idénticas en el plano a las de un círculo. Expresiones como la anterior se escriben comúnmente como

donde r es un vector tridimensional.
Superficies paramétricas
Un toroide con radio mayor R y radio menor r puede definirse paramétricamente como

donde los dos parámetros t y u ambos varían 0 y 2π.
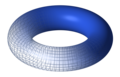
R = 2, r = 1/2

As u de los 0 a 2π el punto en la superficie se mueve alrededor de un corto círculo pasando por el agujero en el toro. As t de los 0 a 2π el punto en la superficie se mueve alrededor de un largo círculo alrededor del agujero en el toro.
Ejemplo con vectores
La ecuación paramétrica de la línea a través del punto y paralelo al vector es



Sistemas lineales indeterminados
Un sistema de ecuaciones lineales m en n desconocidos está subdeterminado si tiene más de una solución. Esto ocurre cuando la matriz del sistema y su matriz aumentada tienen el mismo rango r y r. m. En este caso, se puede seleccionar m − r desconocidos como parámetros y representan todas las soluciones como una ecuación paramétrica donde todos los desconocidos se expresan como combinaciones lineales de los seleccionados. Es decir, si los desconocidos son uno puede reordenarlos para expresar las soluciones como


Tal ecuación paramétrica se llama Forma paramétrica de la solución del sistema.
El método estándar para computar una forma paramétrica de la solución que utiliza la eliminación gaisiana para calcular una forma echelon de fila reducida de la matriz aumentada. Entonces los desconocidos que se pueden utilizar como parámetros son los que corresponden a columnas que no contienen ninguna entrada principal (es decir, la entrada más no cero izquierda en una fila o la matriz), y la forma paramétrica se puede deducir directamente.
Contenido relacionado
Conjunto vacío
Historia de la lógica
Menor que <