
Módulo Lunar Apolo
El Módulo Lunar (LM) de Apolo, originalmente designado como Módulo de Excursión Lunar (LEM), fue la nave espacial de aterrizaje lunar que voló entre la órbita lunar y la superficie de la Luna durante el viaje de los Estados Unidos. Programa Apolo. Fue la primera nave espacial tripulada que operó exclusivamente en el vacío sin aire del espacio y sigue siendo el único vehículo tripulado que aterriza en cualquier lugar más allá de la Tierra.
Estructural y aerodinámicamente incapaz de volar a través de la atmósfera de la Tierra, el módulo lunar de dos etapas fue transportado a la órbita lunar conectado al módulo de comando y servicio (CSM) de Apolo, aproximadamente el doble de su masa. Su tripulación de dos personas voló el módulo lunar completo desde la órbita lunar hasta la superficie de la Luna. Durante el despegue, la etapa de descenso agotada se utilizó como plataforma de lanzamiento para la etapa de ascenso que luego voló de regreso al módulo de comando, después de lo cual también se descartó.
Supervisado por Grumman, el desarrollo del LM estuvo plagado de problemas que retrasaron su primer vuelo sin tripulación unos diez meses y su primer vuelo con tripulación unos tres meses. Aún así, el LM se convirtió en el componente más confiable del vehículo espacial Apolo-Saturno. El costo total del LM para el desarrollo y las unidades producidas fue de $ 21,3 mil millones en dólares de 2016, ajustándose de un total nominal de $ 2,2 mil millones utilizando los índices de inflación New Start de la NASA.
Diez módulos lunares fueron lanzados al espacio. De estos, seis fueron llevados por humanos a la Luna entre 1969 y 1972. Los dos primeros volados fueron pruebas en órbita terrestre baja: Apolo 5, sin tripulación; y Apolo 9 con una tripulación. Un tercer vuelo de prueba en órbita lunar baja fue el Apolo 10, un ensayo general para el primer aterrizaje, realizado en el Apolo 11. El módulo lunar del Apolo 13 funcionó como un bote salvavidas para brindar soporte vital y propulsión para mantener viva a la tripulación para el viaje a casa. cuando su CSM fue desactivado por la explosión de un tanque de oxígeno en el camino a la Luna.
Las seis etapas de descenso con aterrizaje permanecen en sus sitios de aterrizaje; sus correspondientes etapas de ascenso se estrellaron contra la Luna después de su uso. Una etapa de ascenso (el Snoopy del Apolo 10) se descartó en una órbita heliocéntrica después de que su etapa de descenso se descartara en la órbita lunar. Los otros tres LM se quemaron en la atmósfera de la Tierra: las cuatro etapas del Apolo 5 y el Apolo 9 volvieron a entrar por separado, mientras que el Acuario del Apolo 13 volvió a entrar como una unidad.
Perfil operativo
En el momento del lanzamiento, el módulo lunar se colocó directamente debajo del módulo de comando y servicio (CSM) con las patas dobladas, dentro del adaptador de nave espacial a LM (SLA) conectado a la tercera etapa S-IVB del cohete Saturno V. Allí permaneció a través de la órbita de estacionamiento de la Tierra y el encendido del cohete de inyección translunar (TLI) para enviar la nave hacia la Luna.
Poco después de TLI, se abrió el SLA; el CSM realizó una maniobra en la que se separó, dio la vuelta, volvió a atracar con el módulo lunar y lo extrajo del S-IVB. Durante el vuelo a la Luna, se abrieron las escotillas de acoplamiento y el piloto del módulo lunar ingresó al LM para encenderlo temporalmente y probar todos los sistemas excepto la propulsión. El piloto del módulo lunar desempeñó el papel de un oficial de ingeniería, monitoreando los sistemas de ambas naves espaciales.
Después de lograr una órbita de estacionamiento lunar, el comandante y el piloto del LM ingresaron y encendieron el LM, reemplazaron las escotillas y el equipo de acoplamiento, desplegaron y bloquearon sus patas de aterrizaje y se separaron del CSM, volando de forma independiente. El comandante operaba los controles de vuelo y el acelerador del motor, mientras que el piloto del módulo lunar operaba otros sistemas de la nave espacial y mantenía informado al comandante sobre el estado de los sistemas y la información de navegación. Después de que el piloto del módulo de comando inspeccionara visualmente el tren de aterrizaje, el LM se retiró a una distancia segura y luego se giró hasta que el motor de descenso apuntó hacia adelante en la dirección de viaje. Se realizó una quema de inserción de órbita descendente de 30 segundos para reducir la velocidad y dejar caer el perilunio del LM a unos 50 000 pies (15 km) de la superficie, a unas 260 millas náuticas (480 km) del lugar de aterrizaje.

A medida que la nave se acercaba al peligro de extinción, el motor de descenso se encendió nuevamente para comenzar el descenso motorizado. Durante este tiempo, la tripulación voló sobre sus espaldas, dependiendo de la computadora para reducir la velocidad de avance y vertical de la nave a casi cero. El control se ejerció con una combinación de aceleración del motor y propulsores de actitud, guiados por la computadora con la ayuda del radar de aterrizaje. Durante el frenado, el LM descendió a unos 10 000 pies (3,0 km) y luego, en la fase de aproximación final, a unos 700 pies (210 m). Durante la aproximación final, el vehículo se inclinó hasta una posición casi vertical, lo que permitió a la tripulación mirar hacia adelante y hacia abajo para ver la superficie lunar por primera vez.
Los astronautas volaron la nave espacial Apolo manualmente solo durante la aproximación lunar. La fase de aterrizaje final comenzó a unos 0,61 km (2000 pies) de distancia del sitio de aterrizaje objetivo. En este punto, se habilitó el control manual para el comandante, que tenía suficiente propulsor para flotar durante hasta dos minutos para inspeccionar hacia dónde llevaba la computadora la nave y hacer las correcciones necesarias. Si fuera necesario, el aterrizaje podría haberse abortado en casi cualquier momento desechando la etapa de descenso y encendiendo el motor de ascenso para volver a subir a la órbita para un regreso de emergencia al CSM. Finalmente, una o más de las tres sondas de 67,2 pulgadas (1,71 m) que se extendían desde las almohadillas para los pies en las patas del módulo de aterrizaje tocaron la superficie, activando la luz indicadora de contacto que indicó al comandante que apagara el motor de descenso, lo que permitió que el LM se asentara en la superficie. Al aterrizar, las sondas se doblarían hasta 180 grados o incluso se romperían. El diseño original usó las sondas en las cuatro patas, pero a partir del primer aterrizaje (LM-5 en el Apolo 11), se quitó la de la escalera por temor a que la sonda doblada después del aterrizaje pudiera perforar la cabeza de un astronauta. traje mientras descendía o se bajaba de la escalera.
El plan de actividad extravehicular original, hasta al menos 1966, consistía en que solo un astronauta abandonara el LM mientras que el otro permanecía dentro 'para mantener las comunicaciones'. Finalmente, se consideró que las comunicaciones eran lo suficientemente confiables como para permitir que ambos miembros de la tripulación caminaran sobre la superficie, dejando que el control de la misión solo atendiera la nave espacial de forma remota.
A partir del Apolo 14, se puso a disposición propulsor LM adicional para el descenso y el aterrizaje motorizados, mediante el uso del motor CSM para alcanzar el perilunio de 15 km (50 000 pies). Después de que la nave espacial se desacoplara, el CSM elevó y circuló su órbita por el resto de la misión.
Cuando estaba listo para dejar la Luna, el motor de ascenso del LM se encendió, dejando la etapa de descenso en la superficie de la Luna. Después de algunas quemas de corrección de rumbo, el LM se reunió con el CSM y atracó para transferir a la tripulación y muestras de rocas. Habiendo completado su trabajo, la etapa de ascenso se separó. El motor de la etapa de ascenso del Apolo 10 se encendió hasta que se agotó su combustible, enviándolo más allá de la Luna a una órbita heliocéntrica. La etapa de ascenso del Apolo 11 se dejó en órbita lunar para finalmente estrellarse; todas las etapas de ascenso posteriores (excepto el Apolo 13) se dirigieron intencionalmente hacia la Luna para obtener lecturas de sismómetros colocados en la superficie.
Historia

El Módulo Lunar (originalmente denominado Módulo de Excursión Lunar, conocido por el acrónimo LEM) fue diseñado después de que la NASA decidiera llegar a la Luna a través de Lunar Orbit Rendezvous (LOR) en lugar de los métodos de ascenso directo o Earth Orbit Rendezvous (EOR). Tanto el ascenso directo como el EOR habrían implicado el aterrizaje de una nave espacial Apolo mucho más pesada y completa en la Luna. Una vez que se tomó la decisión de proceder con LOR, se hizo necesario producir una nave separada capaz de alcanzar la superficie lunar y ascender de regreso a la órbita lunar.
Ubicación de contrato de arrendamiento y construcción
En julio de 1962, once empresas fueron invitadas a presentar propuestas para el LEM. Nueve empresas respondieron en septiembre, respondiendo a 20 preguntas planteadas por la RFP de la NASA en una propuesta técnica limitada de 60 páginas. Grumman recibió el contrato oficialmente el 7 de noviembre de 1962. Grumman había comenzado los estudios de encuentro de la órbita lunar a fines de la década de 1950 y nuevamente en 1961. Se esperaba que el costo del contrato fuera de alrededor de $ 350 millones. Inicialmente había cuatro subcontratistas principales: Bell Aerosystems (motor de ascenso), Hamilton Standard (sistemas de control ambiental), Marquardt (sistema de control de reacción) y Rocketdyne (motor de descenso).
El Sistema de Control, Navegación y Guiado Primario (PGNCS) fue desarrollado por el Laboratorio de Instrumentación del MIT; la computadora de guía Apollo fue fabricada por Raytheon (se usó un sistema de guía similar en el módulo de comando). TRW desarrolló una herramienta de navegación de respaldo, el Abort Guidance System (AGS).
El módulo lunar Apolo se ensambló en una fábrica de Grumman en Bethpage, Nueva York.
Fase de diseño

El módulo lunar Apolo fue diseñado principalmente por el ingeniero aeroespacial de Grumman, Thomas J. Kelly. El primer diseño de LEM parecía una versión más pequeña del módulo de comando y servicio de Apolo (una cabina en forma de cono sobre una sección de propulsión cilíndrica) con patas plegables. El segundo diseño invocó la idea de una cabina de helicóptero con grandes ventanas y asientos curvos, para mejorar la experiencia de los astronautas. visibilidad para vuelo estacionario y aterrizaje. Esto también incluyó un segundo puerto de atraque delantero, lo que permitió a la tripulación del LEM desempeñar un papel activo en el atraque con el CSM.
A medida que avanzaba el programa, hubo numerosos rediseños para ahorrar peso, mejorar la seguridad y solucionar problemas. Lo primero en desaparecer fueron las pesadas ventanas de la cabina y los asientos; los astronautas estarían de pie mientras volaban el LEM, sostenidos por un sistema de cable y polea, con ventanas triangulares más pequeñas que les brindaban suficiente visibilidad del lugar de aterrizaje. Más tarde, se eliminó el puerto de acoplamiento delantero redundante, lo que significó que Command Pilot cedió el control activo del acoplamiento al Command Module Pilot; todavía podía ver el CSM acercándose a través de una pequeña ventana superior. La salida mientras se usaban voluminosos trajes espaciales para actividades extravehiculares se facilitó con una escotilla delantera más simple (32 pulgadas × 32 pulgadas o 810 mm × 810 mm).
La configuración se congeló en abril de 1963, cuando se decidieron los diseños de los motores de ascenso y descenso. Además de Rocketdyne, se ordenó un programa paralelo para el motor de descenso a Space Technology Laboratories (TRW) en julio de 1963, y en enero de 1965 se canceló el contrato de Rocketdyne.
La energía inicialmente iba a ser producida por celdas de combustible construidas por Pratt y Whitney similares al CSM, pero en marzo de 1965 se descartaron a favor de un diseño de batería.
El diseño inicial tenía tres patas de aterrizaje, la configuración más ligera posible. Pero como cualquier pata en particular tendría que soportar el peso del vehículo si aterrizara en un ángulo significativo, esta también era la configuración menos estable si una de las patas se dañaba durante el aterrizaje. La siguiente iteración del diseño del tren de aterrizaje tenía cinco patas y era la configuración más estable para aterrizar en un terreno desconocido. Esa configuración, sin embargo, era demasiado pesada y los diseñadores se comprometieron con cuatro patas de aterrizaje.
En junio de 1966, se cambió el nombre a Módulo Lunar (LM), eliminando la palabra excursión. Según George Low, Gerente de la Oficina del Programa de Naves Espaciales Apolo, esto se debió a que la NASA temía que la palabra excursión pudiera darle una nota frívola a Apolo. A pesar del cambio de nombre, los astronautas y otro personal de la NASA y Grumman continuaron pronunciando la abreviatura como () en lugar de las letras "L-M".
Entrenamiento de astronautas

Comparando el aterrizaje en la Luna con "una operación de vuelo estacionario", Gus Grissom dijo en 1963 que, aunque la mayoría de los primeros astronautas eran pilotos de combate, "ahora nos preguntamos si el piloto que hizo esto El primer alunizaje no debería ser un piloto de helicóptero con mucha experiencia. Para permitir que los astronautas aprendieran técnicas de aterrizaje lunar, la NASA contrató a Bell Aerosystems en 1964 para construir el Vehículo de investigación de aterrizaje lunar (LLRV), que utilizó un motor a reacción vertical montado en un cardán para contrarrestar cinco sextos de su peso para simular la Luna. s gravedad, además de sus propios propulsores de peróxido de hidrógeno para simular el motor de descenso y el control de actitud del LM. Las pruebas exitosas de dos prototipos LLRV en el Dryden Flight Research Center condujeron en 1966 a la producción de tres vehículos de entrenamiento de aterrizaje lunar (LLTV) que, junto con los LLRV, se usaron para entrenar a los astronautas en el Centro de naves espaciales tripuladas de Houston. Este avión demostró ser bastante peligroso para volar, ya que tres de los cinco fueron destruidos en accidentes. Estaba equipado con un asiento eyectable propulsado por cohetes, por lo que en cada caso el piloto sobrevivió, incluido el primer hombre en caminar sobre la Luna, Neil Armstrong.
Vuelos de desarrollo

El LM-1 se construyó para realizar el primer vuelo sin tripulación para probar los sistemas de propulsión y se lanzó a la órbita terrestre baja sobre un IB de Saturno. Esto se planeó originalmente para abril de 1967, seguido del primer vuelo tripulado ese mismo año. Pero los problemas de desarrollo del LM se habían subestimado, y el vuelo del LM-1 se retrasó hasta el 22 de enero de 1968, como Apolo 5. En ese momento, el LM-2 se mantuvo en reserva en caso de que el LM- 1 vuelo falló, lo que no sucedió.
El LM-3 ahora se convirtió en el primer LM tripulado, nuevamente en volar en órbita terrestre baja para probar todos los sistemas y practicar la separación, el encuentro y el acoplamiento planeados para el Apolo 8 en diciembre de 1968. Pero nuevamente, en el último minuto Los problemas retrasaron su vuelo hasta el Apolo 9 el 3 de marzo de 1969. Se había planeado un segundo vuelo de práctica tripulado en una órbita terrestre más alta para seguir al LM-3, pero se canceló para mantener el cronograma del programa en el buen camino.
Apolo 10 se lanzó el 18 de mayo de 1969, utilizando LM-4 para un "ensayo general" para el alunizaje, practicando todas las fases de la misión excepto la iniciación del descenso motorizado hasta el despegue. El LM descendió a 47 400 pies (9,0 mi; 14,4 km) sobre la superficie lunar, luego se deshizo de la etapa de descenso y usó su motor de ascenso para regresar al CSM.
Vuelos de producción

El primer alunizaje tripulado se produjo el 20 de julio de 1969 en el Apollo 11 LM-5 Eagle. Cuatro días más tarde, la tripulación del Apolo 11 en el módulo de comando Columbia amerizó en el Océano Pacífico, completando el objetivo del presidente John F. Kennedy: "... antes de que termine esta década, de aterrizar un hombre en la Luna y devolverlo sano y salvo a la Tierra".
A esto le siguieron los aterrizajes del Apolo 12 (LM-6 Intrepid) y del Apolo 14 (LM-8 Antares). En abril de 1970, el Apollo 13 LM-7 Aquarius desempeñó un papel inesperado al salvar la vida de los tres astronautas después de que se rompiera un tanque de oxígeno en el módulo de servicio, inhabilitando el CSM. Aquarius sirvió como "salvavidas" para los astronautas durante su regreso a la Tierra. Su motor de etapa de descenso se usó para reemplazar el motor del Sistema de Propulsión de Servicio CSM paralizado, y sus baterías suministraron energía para el viaje a casa y recargaron las baterías del Módulo de Comando, críticas para el reingreso. Los astronautas se amerizaron de forma segura el 17 de abril de 1970. Los sistemas del LM, diseñados para soportar a dos astronautas durante 45 horas (incluidas dos veces la despresurización y la represurización que provocaron la pérdida del suministro de oxígeno), en realidad se estiraron para soportar a tres astronautas durante 90 horas (sin despresurización y represurización y pérdida de suministro de oxígeno).
Los tiempos de vuelo estacionario se maximizaron en las últimas cuatro misiones de aterrizaje mediante el uso del motor del módulo de servicio para realizar la quema de inserción de la órbita de descenso inicial 22 horas antes de que el LM se separara del CSM, una práctica que comenzó en el Apolo 14. Esto significó que la nave espacial completa, incluido el CSM, orbitaron la Luna con un perilunio de 9,1 millas náuticas (16,9 km), lo que permitió al LM comenzar su descenso motorizado desde esa altitud con una carga completa de propulsor de etapa de descenso, dejando más propulsor de reserva para la aproximación final. Luego, el CSM aumentaría su riesgo de vuelta a las 60 millas náuticas (110 km) normales.
Misiones extendidas de clase J

El Módulo Lunar Extendido (ELM) utilizado en las últimas tres "misiones clase J" — Apolo 15, 16 y 17 — se actualizó para aterrizar cargas útiles más grandes y permanecer más tiempo en la superficie lunar. El empuje del motor de descenso se incrementó mediante la adición de una extensión de 10 pulgadas (250 mm) a la campana del motor, y se ampliaron los tanques de propulsor de descenso. Se añadió un tanque de almacenamiento de residuos en la etapa de descenso, con tubería de la etapa de ascenso. Estas actualizaciones permitieron estancias de hasta 75 horas en la Luna.
El Lunar Roving Vehicle fue plegado y transportado en el Cuadrante 1 de la etapa de descenso. Fue desplegado por los astronautas después del aterrizaje, lo que les permitió explorar grandes áreas y devolver una mayor variedad de muestras lunares.
Especificaciones




Los pesos proporcionados aquí son un promedio para los vehículos originales con especificaciones anteriores a ELM. Para conocer los pesos específicos de cada misión, consulte los artículos de cada misión.
Etapa de ascenso
La etapa de ascenso contenía la cabina de la tripulación con paneles de instrumentos y controles de vuelo. Contenía su propio motor Ascent Propulsion System (APS) y dos tanques propulsores hipergólicos para regresar a la órbita lunar y encontrarse con el módulo de comando y servicio de Apolo. También contenía un Sistema de Control de Reacción (RCS) para el control de actitud y traslación, que constaba de dieciséis propulsores hipergólicos similares a los utilizados en el Módulo de Servicio, montados en cuatro quads, con su propio suministro de propulsor. Una escotilla de actividad extravehicular delantera proporcionó acceso hacia y desde la superficie lunar, mientras que una escotilla superior y un puerto de acoplamiento proporcionaron acceso hacia y desde el Módulo de Comando.
El equipo interno incluía un sistema de control ambiental (soporte vital); un sistema de comunicaciones VHF con dos antenas para comunicación con el Módulo de Comando; un sistema de banda S unificado y una antena parabólica orientable para la comunicación con la Tierra; una antena de actividad extravehicular que se asemeja a una sombrilla en miniatura que transmite comunicaciones desde antenas en los astronautas & # 39; Sistemas Portátiles de Soporte Vital a través del LM; sistemas de guía y navegación primarios (PGNCS) y de respaldo (AGS); un telescopio óptico de alineación para determinar visualmente la orientación de la nave espacial; radar de encuentro con su propia antena parabólica orientable; y un sistema de control térmico activo. Las baterías de almacenamiento eléctrico, el agua de refrigeración y el oxígeno para respirar se almacenaron en cantidades suficientes para una estancia en la superficie lunar de 48 horas inicialmente, ampliadas a 75 horas para las misiones posteriores.
Durante los períodos de descanso mientras estaban estacionados en la Luna, la tripulación dormía en hamacas colgadas transversalmente en la cabina.
La carga útil de regreso incluía muestras de suelo y rocas lunares recolectadas por la tripulación (hasta 108 kg (238 libras) en el Apolo 17), además de su película fotográfica expuesta.
- Crew: 2
- Volumen de cabina de tripulación: 235 pies (6,7 m3)
- Volumen habitable: 160 pies (4,5 m3)
- Altura del compartimento de la tripulación: 7 pies 8 en (2,34 m)
- Profundidad del compartimento de la tripulación: 3 pies 6 en (1,07 m)
- Altura: 9 pies 3,5 en (2.832 m)
- Ancho: 14 pies 1 en (4.29 m)
- Profundidad: 13 pies 3 en (4.04 m)
- Masa, seca: 4.740 libras (2.150 kg)
- Masa, bruto: 10.300 libras (4.700 kg)
- Atmósfera: 100% oxígeno a 4.8 psi (33 kPa)
- Agua: dos tanques de almacenamiento de 42,5 libras (19,3 kg)
- Coolant: 25 libras (11 kg) de etileno glicol / solución de agua
- Control térmico: un sublimador activo de hielo-agua
- Masa propelente RCS: 633 lb (287 kg)
- Propulsores RCS: dieciséis x 100 lbf (440 N) en cuatro quads
- Propulsores RCS: Aerozine 50 combustible / Dinitrogen tetroxide (N)2O4óxido
- RCS impulso específico: 290 s (2.8 km/s)
- Masa propelente APS: 5,187 lb (2,353 kg) almacenada en dos pies cúbicos (1,02 m)3) tanques de propulsión
- Motor APS: Bell Aerospace LM Ascent Engine (LMAE) y Rocketdyne LMAE Inyectores
- APS: 3.500 lbf (16.000 N)
- Propulsores APS: Aerozine 50 combustible / Dinitrogen Oxidizador de tetroxido
- APS presurizador: dos tanques de helio de 6.4 lb (2.9 kg) a 3.000 libras por pulgada cuadrada (21 MPa)
- APS impulso específico: 311 s (3.05 km/s)
- APS delta-V: 7.280 pies/s (2.220 m/s)
- ratio de propulsión a peso en el despegue: 2.124 (en gravedad lunar)
- Baterías: dos baterías de 28 a 32 voltios, 296 horas de amperio Silver-zinc; 125 lb (57 kg) cada
- Potencia: 28 V DC, 115 V 400 Hz AC
Etapa de descenso

El trabajo principal de la etapa de descenso era apoyar un aterrizaje motorizado y una actividad extravehicular en la superficie. Terminada la excursión, sirvió de plataforma de lanzamiento para la etapa de ascenso. Su forma octogonal estaba sostenida por cuatro patas plegables del tren de aterrizaje y contenía un motor de sistema de propulsión de descenso (DPS) regulable con cuatro tanques de propulsor hipergólico. El escudo térmico del motor montó una antena de radar Doppler de onda continua en la superficie inferior para enviar datos de altitud y velocidad de descenso al sistema de guía y la pantalla del piloto durante el aterrizaje. Casi todas las superficies externas, excepto la parte superior, la plataforma, la escalera, el motor de descenso y el escudo térmico, estaban cubiertas con láminas de Kapton aluminizadas de color ámbar, ámbar oscuro (rojizo), negro, plateado y amarillo para aislamiento térmico. La pata de aterrizaje número 1 (delantera) tenía una plataforma adjunta (informalmente conocida como el "pórtico") frente a la escotilla de actividad extravehicular de la etapa de ascenso y una escalera, que los astronautas usaron para ascender y descender entre la cabina a la superficie. La almohadilla para los pies de cada pata de aterrizaje incorporaba una sonda sensora de contacto con la superficie de 67 pulgadas de largo (1,7 m), que indicaba al comandante que apagara el motor de descenso. (La sonda se omitió de la etapa número 1 de cada misión de aterrizaje, para evitar el peligro de pinchazos en los trajes para los astronautas, ya que las sondas tendían a romperse y sobresalir hacia arriba de la superficie).
El equipo para la exploración lunar se transportaba en el conjunto de almacenamiento de equipo modular (MESA), un cajón montado en un panel con bisagras que caía del compartimiento delantero izquierdo. Además de las herramientas de excavación de la superficie y las cajas de recolección de muestras del astronauta, el MESA contenía una cámara de televisión con un trípode; cuando el comandante abrió el MESA tirando de un cordón mientras descendía por la escalera, la cámara se activó automáticamente para enviar las primeras imágenes de los astronautas en la superficie de regreso a la Tierra. Una bandera de los Estados Unidos para que los astronautas la erigieran en la superficie se transportaba en un contenedor montado en la escalera de cada misión de aterrizaje.
El primer paquete de experimentos de superficie de Apolo (más tarde el paquete de experimentos de superficie lunar de Apolo) se transportaba en el compartimento opuesto detrás del módulo lunar. Un compartimento externo en el panel frontal derecho llevaba una antena de banda S desplegable que, cuando se abría, parecía un paraguas invertido sobre un trípode. Esto no se usó en el primer aterrizaje debido a limitaciones de tiempo y al hecho de que se estaban recibiendo comunicaciones aceptables usando la antena de banda S del LM, pero se usó en los Apolo 12 y 14. Un transportador de equipo modular tirado a mano (MET), similar en apariencia a un carrito de golf, fue transportado en los Apolo 13 y 14 para facilitar el transporte de herramientas y muestras en caminatas lunares prolongadas. En las misiones extendidas (Apolo 15 y posteriores), la antena y la cámara de televisión se montaron en el Lunar Roving Vehicle, que se transportaba plegado y montado en un panel externo. Los compartimentos también contenían baterías de reemplazo del Sistema de soporte vital portátil (PLSS) y botes de hidróxido de litio adicionales en las misiones extendidas.
- Altura: 10 ft 7.2 en (3.231 m) (más 5 ft 7.2 en sondas de aterrizaje (1.707 m)
- Anchura / profundidad, menos el aterrizaje: 13 pies 10 en (4.22 m)
- Anchura/enfoque de aterrizaje extendido: 31.0 pies (9.4 m)
- Masa incluida: 22.783 libras (10.334 kg)
- Agua: un tanque de almacenamiento de 151 kg (333 lb)
- Masa propelente DPS: 18.000 libras (8.200 kg) almacenadas en cuatro 67,3 pies cúbicos (1,906 m)3) tanques de propulsión
- Motor DPS: motor de descenso TRW LM (LMDE)
- Propulsión DPS: 10.125 lbf (45.040 N), oscilable entre el 10% y el 60% de la empuje total
- Propulsores DPS: Aerozina 50 combustible / óxido de nitrógeno tetroxido
- Pressurant DPS: un tanque de helio supercritical de 49 libras (22 kg) en 1.555 psi (10.72 MPa)
- impulso específico del DPS: 311 s (3.050 N⋅s/kg)
- DPS delta-V: 8.100 pies/s (2.500 m/s)
- Baterías: cuatro (Apollo 9–14) o cinco (Apollo 15–17) 28–32 V, 415 baterías A⋅h plate-zinc; 135 lb (61 kg)
Módulos lunares producidos
| Número de serie | Nombre | Uso | Fecha de lanzamiento | Ubicación | Imagen |
|---|---|---|---|---|---|
| LTA-1 | Unflown | Cradle of Aviation Museum (Long Island, NY) |  | ||
| LTA-2R | Apolo 6 | 4 de abril de 1968 | Atmósfera de la Tierra | | |
| LTA-3A | Unflown | Kansas Cosmosphere and Space Center |  | ||
| LTA-3DR | Etapa de ascendencia inundada | Franklin Institute |  | ||
| LTA-5D | Unflown | NASA White Sands Fondo de prueba | |||
| LTA-8A | Prueba de módulo lunar Artículo no.8 | Pruebas termales-vacuo | Pruebas terrestres en 1968 | Space Center Houston |
|
| LTA-10R | Apolo 4 | 9 de noviembre de 1967 | Atmósfera de la Tierra | ||
| MSC-16 | Etapa de ascenso no lucrativa | Museum of Science and Industry (Chicago) |  | ||
| TM-5 | No vuelos | Museum of Life and Science (Durham, NC) |  | ||
| PA-1 | Unflown | White Sands Fondo de prueba | |||
| LM-1 | Apolo 5 | 22 de enero de 1968 | Atmósfera de la Tierra | -7_in_the_Kennedy_Space_Center%27s_Manned_Spacecraft_Operations_Building.jpg) | |
| LM-2 | Intended for second uncrewed flight, used instead for ground testing. Material de aterrizaje añadido para pruebas de gota. Telescopio óptico de alineación y ordenador de vuelo | National Air and Space Museum (Washington, D.C.) |  | ||
| LM-3 | Spider | Apolo 9 | 3 de marzo de 1969 | Las etapas de descenso y ascenso volvieron a la atmósfera de la Tierra por separado |  |
| LM-4 | Snoopy | Apolo 10 | 18 de mayo de 1969 | La etapa de descenso puede haber alcanzado la Luna, etapa de ascenso en órbita heliocéntrico. Snoopy es la única etapa de ascenso de LM que ha sobrevivido intacta (posiblemente asteroide 2018 AV2). |  |
| LM-5 | Águila | Apolo 11 | 16 de julio de 1969 | Etapa descendente en la superficie lunar en el Mar de Tranquidad, etapa de ascensión izquierda en órbita lunar (podría estar todavía orbitando la luna) |  |
| LM-6 | Intrépido | Apolo 12 | 14 de noviembre de 1969 | Etapa de descenso en la superficie lunar en el Océano de las Tormentas, etapa de ascenso deliberadamente chocó contra la Luna |  |
| LM-7 | Aquarius | Apolo 13 | 11 de abril de 1970 | Atmósfera de la Tierra |  |
| LM-8 | Antares | Apolo 14 | 31 de enero de 1971 | Etapa decente en la superficie lunar en Fra Mauro, etapa de ascenso deliberadamente chocó contra la Luna |  |
| LM-9 | No voló, como Apolo 15, última misión de clase H | En exhibición en el Centro Espacial Kennedy (Apollo/Saturn V Center) |  | ||
| LM-10 | Falcon | Apolo 15, primer ELM | 26 de julio de 1971 | Etapa descentiva en la superficie lunar en Hadley-Apennine, etapa de ascensión deliberadamente chocó contra la Luna |  |
| LM-11 | Orión | Apolo 16 | 16 de abril de 1972 | Etapa de descenso en la superficie lunar en Descartes Highlands, etapa de ascenso izquierda en órbita lunar, estrellada en la Luna |  |
| LM-12 | Challenger | Apolo 17 | 7 de diciembre de 1972 | Etapa descendente en la superficie lunar en Taurus-Littrow, etapa de ascensión deliberadamente chocó contra la Luna |  |
| LM-13 | No voló, pretendida como Apolo 19 | Completado parcialmente por Grumman, restaurado y expuesto en el Cradle of Aviation Museum (Long Island, NY). También se utiliza durante las miniseries de 1998 De la Tierra a la Luna. |  | ||
| LM-14 | No fluído, destinado como Apolo 20 | Incompleta, lo más probable es que se despedaza | | ||
| LM-15 | No volado, destinado a modificación en el montaje del telescopio Apolo | Incompleta, raspada | |||
| * Para la ubicación de los LMs que quedan en la superficie Lunar, vea la lista de objetos hechos por el hombre en la Luna. | |||||


Derivadas propuestas
(feminine)Montaje del telescopio Apolo

Una aplicación propuesta de Apolo era un telescopio solar orbital construido a partir de un LM excedente con su motor de descenso reemplazado por un telescopio controlado desde la cabina de la etapa de ascenso, las patas de aterrizaje eliminadas y cuatro "molino de viento" paneles solares que se extienden desde los cuadrantes de la etapa de descenso. Esto se habría lanzado en un Saturn 1B sin tripulación y acoplado con un módulo de comando y servicio tripulado, llamado Apollo Telescope Mission (ATM).
Esta idea se transfirió más tarde al diseño original del taller húmedo para el taller orbital Skylab y se le cambió el nombre a Montura del telescopio Apolo para acoplarse en un puerto lateral del adaptador de acoplamiento múltiple del taller (MDA). Cuando Skylab cambió a un "taller seco" diseño prefabricado en tierra y lanzado en un Saturno V, el telescopio se montó en un brazo articulado y se controló desde el interior del MDA. Solo se mantuvieron la forma octogonal del contenedor del telescopio, los paneles solares y el nombre de la montura del telescopio Apolo, aunque ya no hubo ninguna asociación con el LM.
Camión LM
El camión Apollo LM (también conocido como Módulo de carga lunar) era una etapa de descenso independiente del LM destinada a entregar hasta 11 000 libras (5,0 t) de carga útil a la Luna para un aterrizaje sin tripulación. Esta técnica estaba destinada a entregar equipos y suministros a una base lunar tripulada permanente. Como se propuso originalmente, se lanzaría en un Saturno V con una tripulación completa de Apolo para acompañarlo a la órbita lunar y guiarlo a un aterrizaje junto a la base; luego, la tripulación de la base descargaría el "camión" mientras la tripulación en órbita regresaba a la Tierra. En planes posteriores de AAP, el LPM habría sido entregado por un vehículo de transbordador lunar sin tripulación.
Representación en cine y televisión
La película de 1995 de Ron Howard Apollo 13, una dramatización de esa misión protagonizada por Tom Hanks, Kevin Bacon y Bill Paxton, fue filmada usando reconstrucciones realistas del interior de la nave espacial del Aquarius y el Módulo de Comando Odyssey. En 2013, en el programa de televisión Arrested Development, se representa una versión ficticia de Howard con el Apolo 11 "LEM" en su oficina, que según su personaje se usó para falsificar el alunizaje de 1969.
El desarrollo y la construcción del módulo lunar se dramatizan en el episodio de la miniserie De la Tierra a la Luna de 1998 titulado "Spider". Esto es en referencia al LM-3, utilizado en el Apolo 9, al que la tripulación llamó Spider por su apariencia de araña. El LM-13 no utilizado se presentó durante la teleplay para representar el LM-3 y el LM-5, Eagle, utilizados por el Apolo 11.
El águila del módulo lunar del Apolo 11 se representa en la película de 2018 First Man, una película biográfica de Neil Armstrong.
Medios
Neil Armstrong aterriza el Apolo 11 Lunar Módulo Águila en la Luna, 20 de julio de 1969, creando la Base Tranquility. Comienza aproximadamente a 6200 pies de la superficie.
David Scott aterriza Apolo 15 Lunar Módulo Falcon sobre la Luna el 30 de julio de 1971, vista desde la perspectiva del Piloto del Módulo Lunar. Empieza a unos 5000 pies de la superficie.
Módulo Apollo 15 Lunar Falcon se levanta de la Luna, 2 de agosto de 1971. Vista desde la cámara de TV en el Vehículo Lunar Roving.
Apolo 15 Salida del módulo lunar. Vista desde dentro Falcon.
Módulo Apollo 17 Lunar Challenger despegue de la Luna el 14 de diciembre de 1972. Vista desde la cámara de TV en el Vehículo Lunar Roving.

Planes de ubicación del equipo (1 de 2)
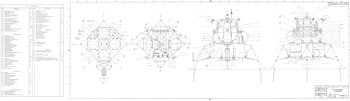
Planes de ubicación del equipo (2 de 2)

Planes de control
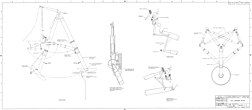
Landing Gear plans




Contenido relacionado
Pueblo romaní
Historia de los Emiratos Árabes Unidos
Actas de Unión 1707