
Conjunto convexo


En geometría, un subconjunto de un espacio euclidiano, o más generalmente un espacio afín sobre los reales, es convexo si, dados dos puntos cualesquiera en el subconjunto, el subconjunto contiene el segmento de línea completo que se une a ellos. De manera equivalente, un conjunto convexo o una región convexa es un subconjunto que cruza cada línea en un solo segmento de línea (posiblemente vacío). Por ejemplo, un cubo sólido es un conjunto convexo, pero cualquier cosa que sea hueca o tenga una muesca, por ejemplo, una forma de media luna, no es convexa.
El límite de un conjunto convexo es siempre una curva convexa. La intersección de todos los conjuntos convexos que contienen un subconjunto dado A del espacio euclidiano se denomina envolvente convexa de A. Es el conjunto convexo más pequeño que contiene A.
Una función convexa es una función de valor real definida en un intervalo con la propiedad de que su epígrafe (el conjunto de puntos sobre o sobre el gráfico de la función) es un conjunto convexo. La minimización convexa es un subcampo de optimización que estudia el problema de minimizar funciones convexas sobre conjuntos convexos. La rama de las matemáticas dedicada al estudio de las propiedades de los conjuntos convexos y de las funciones convexas se denomina análisis convexo.
La noción de un conjunto convexo se puede generalizar como se describe a continuación.
Definiciones

Sea S un espacio vectorial o un espacio afín sobre los números reales o, más generalmente, sobre algún campo ordenado. Esto incluye espacios euclidianos, que son espacios afines. Un subconjunto C de S es convexo si, para todo x y y en C, el segmento de línea que conecta x y y se incluyen en C. Esto significa que la combinación afín (1 − t)x + ty pertenece a C, para todas las x y y en C y t en el intervalo [0, 1]. Esto implica que la convexidad (la propiedad de ser convexo) es invariante bajo transformaciones afines. Esto implica también que un conjunto convexo en un espacio vectorial topológico real o complejo está conectado por caminos, por lo tanto conectado.
Un conjunto C es estrictamente convexo si cada punto en el segmento de línea que conecta x y y que no sean los extremos está dentro del interior topológico de C. Un subconjunto convexo cerrado es estrictamente convexo si y solo si cada uno de sus puntos límite es un punto extremo.
Un conjunto C es absolutamente convexo si es convexo y equilibrado.
Los subconjuntos convexos de R (el conjunto de números reales) son los intervalos y los puntos de R. Algunos ejemplos de subconjuntos convexos del plano euclidiano son polígonos regulares sólidos, triángulos sólidos e intersecciones de triángulos sólidos. Algunos ejemplos de subconjuntos convexos de un espacio tridimensional euclidiano son los sólidos de Arquímedes y los sólidos platónicos. Los poliedros de Kepler-Poinsot son ejemplos de conjuntos no convexos.
Conjunto no convexo
Un conjunto que no es convexo se llama conjunto no convexo. Un polígono que no es un polígono convexo a veces se denomina polígono cóncavo, y algunas fuentes generalmente usan el término conjunto cóncavo para referirse a un conjunto no convexo, pero la mayoría de las autoridades prohíben este uso.
El complemento de un conjunto convexo, como el epígrafe de una función cóncava, a veces se denomina conjunto convexo inverso, especialmente en el contexto de la optimización matemática.
Propiedades
Dados r puntos u1,..., ur en un conjunto convexo S y r números no negativos λ1,..., λr tal que λ1 +... + λr = 1 , la combinación afín

Tal combinación afín se llama combinación convexa de u1,..., ur .
Intersecciones y uniones
La colección de subconjuntos convexos de un espacio vectorial, un espacio afín o un espacio euclidiano tiene las siguientes propiedades:
- El conjunto vacío y todo el espacio son convexos.
- La intersección de cualquier colección de conjuntos convex es convex.
- El sindicato de una secuencia de conjuntos de convex es convex, si forman una cadena no-disminución para la inclusión. Para esta propiedad, la restricción a cadenas es importante, ya que la unión de dos conjuntos convexo no necesita Sé convex.
Conjuntos convexos cerrados
Los conjuntos convexos cerrados son conjuntos convexos que contienen todos sus puntos límite. Se pueden caracterizar como las intersecciones de medios espacios cerrados (conjuntos de puntos en el espacio que se encuentran sobre ya un lado de un hiperplano).
De lo que se acaba de decir, es claro que tales intersecciones son convexas, y también serán conjuntos cerrados. Para demostrar lo contrario, es decir, cada conjunto convexo cerrado puede representarse como tal intersección, se necesita el teorema del hiperplano de apoyo en la forma que para un conjunto convexo cerrado dado C y punto P fuera de él, hay un semiespacio cerrado H que contiene C y no P. El teorema del hiperplano de apoyo es un caso especial del teorema de análisis funcional de Hahn-Banach.
Conjuntos convexos y rectángulos
Sea C un cuerpo convexo en el plano (un conjunto convexo cuyo interior no está vacío). Podemos inscribir un rectángulo r en C tal que una copia homotética R de r se circunscribe a C. La relación de homotecia positiva es como máximo 2 y:

Diagramas de Blaschke-Santaló
El set K2{displaystyle {fnMithcal} {fnK}} {fnMicrosoft}} {fnMicrosoft}}} {fnK}}} {fnMicrosoft}}}}} {fnK}}}}}} {fnK}}}} {fnK}}}}}}}}}}} de todos los cuerpos convexos plano pueden ser parametizados en términos del diámetro del cuerpo convexo D, su inradius r (el círculo más grande contenido en el cuerpo convexo) y su circunradius R (el círculo más pequeño que contiene el cuerpo convexo). De hecho, este conjunto puede ser descrito por el conjunto de desigualdades dadas por





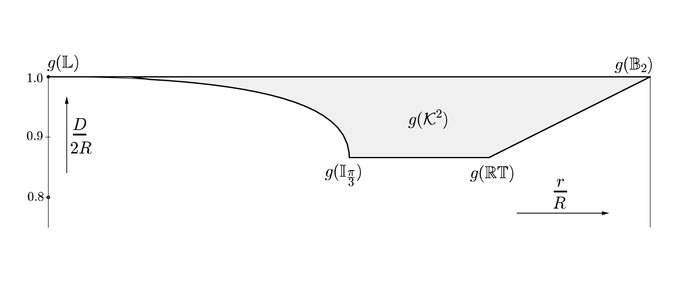




Alternativamente, el conjunto K2{displaystyle {fnMithcal} {fnK}} {fnMicrosoft}} {fnMicrosoft}}} {fnK}}} {fnMicrosoft}}}}} {fnK}}}}}} {fnK}}}} {fnK}}}}}}}}}}} también se puede parametrizar por su ancho (la distancia más pequeña entre cualquier dos hiperplanos de soporte paralelo diferentes), perímetro y área.
Otras propiedades
Vamos X ser un espacio vectorial topológico y C⊆ ⊆ X{displaystyle Csubseteq X} Sé convex.

- Cl C{displaystyle operatorname {Cl} C} y Int C{displaystyle operatorname {Int} C} son ambos convex (es decir, el cierre y el interior de conjuntos convex son convex).
- Si a▪ ▪ Int C{displaystyle ain operatorname {Int} C} y b▪ ▪ Cl C{displaystyle bin operatorname {Cl} C} entonces [a,b[⊆ ⊆ Int C{displaystyle [a,b[,subseteq operatorname {Int} C} (donde) <math alttext="{displaystyle [a,b[,:=left{(1-r)a+rb:0leq r[a,b[:={}()1− − r)a+rb:0≤ ≤ r.1}{displaystyle [a,b[,:=left{(1-r)a+rb:0leq r made1right}<img alt="{displaystyle [a,b[,:=left{(1-r)a+rb:0leq r).
- Si Int Cل ل ∅ ∅ {displaystyle operatorname Cneq emptyset entonces:
- cl ()Int C)=Cl C{displaystyle operatorname {cl} left(operatorname) {Int} Cright)=fnMiembro de operador {Cl} C}, y
- Int C=Int ()Cl C)=Ci{displaystyle operatorname {Int} C=operatorname {Int} left(operatorname {Cl} Cright)=C^{i}, donde Ci{displaystyle C^{i} es el interior algebraico de C.









Cascos convexos y sumas de Minkowski
Cascos convexos
Cada subconjunto A del espacio vectorial está contenido dentro de un conjunto convexo más pequeño (llamado el casco convexo de A), es decir, la intersección de todos los conjuntos convexos que contienen A . El operador de casco convexo Conv() tiene las propiedades características de un operador de casco:
- extensiva: S⊆ Conv(S),
- no disminución: S⊆T implica que Conv(S⊆ Conv(T), y
- idempotente: Conv(Conv(S) = Conv(S).
La operación de casco convexo es necesaria para que el conjunto de conjuntos convexos forme una red, en la que la "unión" la operación es el casco convexo de la unión de dos conjuntos convexos

Adición de Minkowski
![Three squares are shown in the nonnegative quadrant of the Cartesian plane. The square Q1 = [0, 1] × [0, 1] is green. The square Q2 = [1, 2] × [1, 2] is brown, and it sits inside the turquoise square Q1+Q2=[1,3]×[1,3].](https://en.wikipedia.org/wiki/File:Minkowski_sum_graph_-_vector_version.svg)
En un espacio vectorial real, la suma de Minkowski de dos conjuntos (no vacíos), S1 y S2, se define como el conjunto S1 + S2 formado por la suma de vectores elemento-sabio del sumando -conjuntos


Para la suma de Minkowski, el conjunto cero {0} que contiene solo el vector cero 0 tiene especial importancia: Para todo subconjunto no vacío S de un espacio vectorial

Cascos convexos de sumas de Minkowski
La suma de Minkowski se comporta bien con respecto a la operación de tomar cascos convexos, como lo muestra la siguiente proposición:
Sean S1, S2 subconjuntos de un espacio vectorial real, la envolvente convexa de su suma de Minkowski es la suma de Minkowski de sus envolventes convexas

Este resultado es más general para cada colección finita de conjuntos no vacíos:

En terminología matemática, las operaciones de suma de Minkowski y de formación de cascos convexos son operaciones de conmutación.
Sumas de Minkowski de conjuntos convexos
La suma de Minkowski de dos conjuntos convexos compactos es compacta. La suma de un conjunto convexo compacto y un conjunto convexo cerrado es cerrada.
El siguiente teorema famoso, probado por Dieudonné en 1966, da una condición suficiente para que la diferencia de dos subconjuntos convexos cerrados sea cerrada. Utiliza el concepto de un cono de recesión de un subconjunto convexo no vacío S, definido como:





Theorem (Dieudonné). Vamos A y B ser subconjuntos no vacíos, cerrados y convexos de un espacio vectorial topológico localmente convexo tal que rec A∩ ∩ rec B{displaystyle operatorname {rec} Acap operatorname {rec} B} es un subespacio lineal. Si A o B es localmente compacto entonces A−B está cerrado.

Generalizaciones y extensiones para convexidad
La noción de convexidad en el espacio euclidiano puede generalizarse modificando la definición en unos u otros aspectos. El nombre común "convexidad generalizada" se utiliza, porque los objetos resultantes conservan ciertas propiedades de los conjuntos convexos.
Conjuntos estrella-convexos (en forma de estrella)
Sea C un conjunto en un espacio vectorial real o complejo. C es estrella convexa (en forma de estrella) si existe una x0 en C tal que la línea segmento desde x0 hasta cualquier punto y en C está contenido en C. Por lo tanto, un conjunto convexo no vacío siempre es convexo en estrella, pero un conjunto convexo en estrella no siempre es convexo.
Convexidad ortogonal
Un ejemplo de convexidad generalizada es la convexidad ortogonal.
Un conjunto S en el espacio euclidiano se llama ortogonalmente convexo u orto- convexo, si cualquier segmento paralelo a cualquiera de los ejes de coordenadas que conectan dos puntos de S se encuentra totalmente dentro de S. Es fácil demostrar que una intersección de cualquier colección de conjuntos ortoconvexos es ortoconvexa. Algunas otras propiedades de los conjuntos convexos también son válidas.
Geometría no euclidiana
La definición de un conjunto convexo y un casco convexo se extiende naturalmente a las geometrías que no son euclidianas al definir un conjunto geodésicamente convexo como aquel que contiene las geodésicas que unen dos puntos cualesquiera del conjunto.
Topología de orden
La convexidad se puede extender para un conjunto totalmente ordenado X dotado de la topología de orden.
Sea Y ⊆ X. El subespacio Y es un conjunto convexo si para cada par de puntos a, b en Y tal que a ≤ b, el intervalo [a, b ] = {x ∈ X | a ≤ x ≤ b} está contenido en Y. Es decir, Y es convexo si y solo si para todos a, b en Y, a ≤ b implica [a, b] ⊆ Y.
Un conjunto convexo no es conexo en general: el subespacio {1,2,3} en Z, que es a la vez convexo y no conectado.
Espacios de convexidad
La noción de convexidad puede generalizarse a otros objetos, si se seleccionan ciertas propiedades de convexidad como axiomas.
Dado un conjunto X, una convexidad sobre el estilo X es una colección 𝒞 de subconjuntos del estilo X satisfaciendo los siguientes axiomas:
- El set vacío y X están dentro C
- La intersección de cualquier colección de C está dentro C.
- La unión de una cadena (con respecto a la relación de inclusión) de elementos de C está dentro C.
Los elementos de 𝒞 se denominan conjuntos convexos y el par (X, 𝒞) se denomina espacio de convexidad. Para la convexidad ordinaria, se cumplen los dos primeros axiomas y el tercero es trivial.
Para una definición alternativa de convexidad abstracta, más adecuada para la geometría discreta, consulte las geometrías convexas asociadas con antimatroides.
Contenido relacionado
Trapecio (figura geométrica)
Tensor
Ángulo sólido