Família de transformações lineares
Na física, as transformações de Lorentz são uma família de seis parâmetros de transformações lineares de um quadro de coordenadas no espaço-tempo para outro quadro que se move a uma velocidade constante em relação ao anterior. A respectiva transformação inversa é então parametrizada pelo negativo desta velocidade. As transformações receberam o nome do físico holandês Hendrik Lorentz.
A forma mais comum da transformação, parametrizada pela constante real  representando uma velocidade confinada ao x-direção, é expressa como
representando uma velocidade confinada ao x-direção, é expressa como

 vcvc
vcvc vc
vcExpressando a velocidade como  uma forma equivalente da transformação é
uma forma equivalente da transformação é

Os referenciais podem ser divididos em dois grupos: inercial (movimento relativo com velocidade constante) e não inercial (aceleração, movimento em trajetórias curvas, movimento rotacional com velocidade angular constante, etc.). O termo "transformações de Lorentz" refere-se apenas a transformações entre referenciais inerciais, geralmente no contexto da relatividade especial.
Em cada quadro de referência, um observador pode usar um sistema de coordenadas locais (normalmente coordenadas cartesianas neste contexto) para medir comprimentos e um relógio para medir intervalos de tempo. Um evento é algo que acontece em um ponto no espaço em um instante de tempo, ou mais formalmente em um ponto no espaço-tempo. As transformações conectam as coordenadas de espaço e tempo de um evento medido por um observador em cada quadro.
Eles substituem a transformação galileana da física newtoniana, que assume um espaço e tempo absolutos (ver relatividade galileana). A transformação de Galileu é uma boa aproximação apenas em velocidades relativas muito menores que a velocidade da luz. As transformações de Lorentz têm várias características não intuitivas que não aparecem nas transformações de Galileu. Por exemplo, eles refletem o fato de que observadores movendo-se em diferentes velocidades podem medir diferentes distâncias, tempos decorridos e até diferentes ordenações de eventos, mas sempre de forma que a velocidade da luz seja a mesma em todos os referenciais inerciais. A invariância da velocidade da luz é um dos postulados da relatividade restrita.
Historicamente, as transformações foram o resultado de tentativas de Lorentz e outros para explicar como a velocidade da luz foi observada como sendo independente do referencial, e para entender as simetrias das leis do eletromagnetismo. A transformação de Lorentz está de acordo com a relatividade especial de Albert Einstein, mas foi derivada primeiro.
A transformação de Lorentz é uma transformação linear. Pode incluir uma rotação do espaço; uma transformação de Lorentz sem rotação é chamada de aumento de Lorentz. No espaço de Minkowski - o modelo matemático do espaço-tempo na relatividade especial - as transformações de Lorentz preservam o intervalo do espaço-tempo entre quaisquer dois eventos. Essa propriedade é a propriedade definidora de uma transformação de Lorentz. Eles descrevem apenas as transformações nas quais o evento do espaço-tempo na origem é deixado fixo. Eles podem ser considerados como uma rotação hiperbólica do espaço de Minkowski. O conjunto mais geral de transformações que também inclui traduções é conhecido como grupo de Poincaré.
História
Muitos físicos - incluindo Woldemar Voigt, George FitzGerald, Joseph Larmor e o próprio Hendrik Lorentz - vinham discutindo a física implícita nessas equações desde 1887. No início de 1889, Oliver Heaviside havia mostrado a partir das equações de Maxwell que o o campo elétrico em torno de uma distribuição esférica de carga deve deixar de ter simetria esférica uma vez que a carga esteja em movimento em relação ao éter luminífero. FitzGerald então conjecturou que o resultado da distorção de Heaviside poderia ser aplicado a uma teoria de forças intermoleculares. Alguns meses depois, FitzGerald publicou a conjectura de que os corpos em movimento estão sendo contraídos, a fim de explicar o desconcertante resultado do experimento de 1887 do vento de éter de Michelson e Morley. Em 1892, Lorentz apresentou independentemente a mesma ideia de maneira mais detalhada, que posteriormente foi chamada de hipótese da contração de FitzGerald-Lorentz. Sua explicação era amplamente conhecida antes de 1905.
Lorentz (1892–1904) e Larmor (1897–1900), que acreditavam na hipótese do éter luminífero, também procuraram a transformação sob a qual as equações de Maxwell são invariantes quando transformadas do éter para um referencial móvel. Eles estenderam a hipótese de contração de FitzGerald-Lorentz e descobriram que a coordenada de tempo também deve ser modificada ("hora local"). Henri Poincaré deu uma interpretação física para a hora local (de primeira ordem em v/c, a velocidade relativa dos dois referenciais normalizados para a velocidade da luz) como consequência de sincronização do relógio, assumindo que a velocidade da luz é constante em quadros móveis. Acredita-se que Larmor tenha sido o primeiro a entender a propriedade crucial de dilatação do tempo inerente a suas equações.
Em 1905, Poincaré foi o primeiro a reconhecer que a transformação tem as propriedades de um grupo matemático,
e ele deu o nome de Lorentz.
Mais tarde, no mesmo ano, Albert Einstein publicou o que hoje é chamado de relatividade especial, derivando a transformação de Lorentz sob as suposições do princípio da relatividade e da constância da velocidade da luz em qualquer referencial inercial e abandonando o éter mecanicista como desnecessário.
Derivação do grupo de transformações de Lorentz
Um evento é algo que acontece em um determinado ponto do espaço-tempo, ou mais geralmente, o ponto no próprio espaço-tempo. Em qualquer referencial inercial, um evento é especificado por uma coordenada de tempo ct e um conjunto de coordenadas cartesianas x, y, z para especificar a posição no espaço nesse quadro. Subscritos rotulam eventos individuais.
Do segundo postulado da relatividade de Einstein (invariância de c) segue-se que:
 | | (D1) |
em todos os referenciais inerciais para eventos conectados por sinais luminosos. A quantidade à esquerda é chamada de intervalo de espaço-tempo entre os eventos a1 = (t1, x1, y1, z 1) e a2 = (t2, x2, y2, z2). O intervalo entre dois quaisquer eventos, não necessariamente separados por sinais de luz, é de fato invariante, ou seja, independente do estado de movimento relativo de observadores em diferentes referenciais inerciais, como é mostrado usando homogeneidade e isotropia de espaço. A transformação procurada, portanto, deve possuir a propriedade que:
![{displaystyle {begin{aligned}&c^{2}(t_{2}-t_{1})^{2}-(x_{2}-x_{1})^{2}-(y_{2}-y_{1})^{2}-(z_{2}-z_{1})^{2}\[6pt]={}&c^{2}(t_{2}'-t_{1}')^{2}-(x_{2}'-x_{1}')^{2}-(y_{2}'-y_{1}')^{2}-(z_{2}'-z_{1}')^{2}quad {text{(all events 1, 2)}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d685ef5891f02b82c2656cc341f2016d231c4549) | | (D2) |
onde (ct, x, y, z)< /span> são as coordenadas do espaço-tempo usadas para definir eventos em um quadro, e (ct′, x′, y′, z′) são as coordenadas em outro quadro. Primeiro observa-se que (D2) é satisfeito se um 4-uplo b arbitrário de números são adicionados aos eventos a1 e a2. Tais transformações são chamadas de translações espaço-temporais e não serão tratadas aqui. Observa-se então que uma solução linear preservando a origem do problema mais simples também resolve o problema geral:
![{displaystyle {begin{aligned}&c^{2}t^{2}-x^{2}-y^{2}-z^{2}=c^{2}t'^{2}-x'^{2}-y'^{2}-z'^{2}\[6pt]{text{or}}quad &c^{2}t_{1}t_{2}-x_{1}x_{2}-y_{1}y_{2}-z_{1}z_{2}=c^{2}t'_{1}t'_{2}-x'_{1}x'_{2}-y'_{1}y'_{2}-z'_{1}z'_{2}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f78e5280c899e10f32769743cf58e272651c33e4) | | (D3) |
(uma solução que satisfaz a primeira fórmula também satisfaz automaticamente a segunda; veja a identidade de polarização). Encontrar a solução para o problema mais simples é apenas uma questão de pesquisa na teoria de grupos clássicos que preservam formas bilineares de várias assinaturas. A primeira equação em (D3) pode ser escrita de forma mais compacta como:
 | | (D4) |
onde (·, ·) refere-se à forma bilinear da assinatura (1, 3) em R4 exposto pela fórmula do lado direito em (D3). A notação alternativa definida à direita é chamada de produto escalar relativístico. O espaço-tempo matematicamente visto como R4 dotado dessa forma bilinear é conhecido como espaço de Minkowski M. A transformação de Lorentz é, portanto, um elemento do grupo O(1, 3), o grupo Lorentz ou, para aqueles que preferem a outra assinatura métrica, O(3, 1) (também chamado de grupo de Lorentz). Um tem:
 | | (D5) |
que é precisamente a preservação da forma bilinear (D3) que implica (pela linearidade de Λ e bilinearidade da forma) que (D2) está satisfeito. Os elementos do grupo Lorentz são rotações e aumentos e suas misturas. Se as translações do espaço-tempo forem incluídas, obtém-se o grupo não homogêneo de Lorentz ou o grupo de Poincaré.
Generalidades
As relações entre as coordenadas de espaço-tempo com e sem linha são as transformações de Lorentz, cada coordenada em um quadro é uma função linear de todas as coordenadas no outro quadro e as funções inversas são a transformação inversa. Dependendo de como os quadros se movem um em relação ao outro e como são orientados no espaço em relação um ao outro, outros parâmetros que descrevem direção, velocidade e orientação entram nas equações de transformação.
Transformações que descrevem movimento relativo com velocidade constante (uniforme) e sem rotação dos eixos de coordenadas espaciais são chamadas de aumento de Lorentz ou simplesmente aumenta, e a velocidade relativa entre os quadros é o parâmetro da transformação. O outro tipo básico de transformação de Lorentz é a rotação apenas nas coordenadas espaciais, esses aumentos semelhantes são transformações inerciais, pois não há movimento relativo, os quadros são simplesmente inclinados (e não giram continuamente) e, nesse caso, as quantidades que definem a rotação são as parâmetros da transformação (por exemplo, representação eixo-ângulo, ou ângulos de Euler, etc.). Uma combinação de rotação e aumento é uma transformação homogênea, que transforma a origem de volta à origem.
O grupo Lorentz completo O(3, 1) também contém transformações especiais que não são rotações nem aumentos, mas sim reflexões em um plano através da origem. Dois deles podem ser destacados; inversão espacial em que as coordenadas espaciais de todos os eventos são invertidas em sinal e inversão temporal em que a coordenada de tempo para cada evento fica com seu sinal invertido.
Boosts não devem ser confundidos com meros deslocamentos no espaço-tempo; neste caso, os sistemas de coordenadas são simplesmente deslocados e não há movimento relativo. No entanto, estes também contam como simetrias forçadas pela relatividade especial, uma vez que deixam o intervalo de espaço-tempo invariante. Uma combinação de uma rotação com um impulso, seguido por uma mudança no espaço-tempo, é uma transformação de Lorentz não homogênea, um elemento do grupo de Poincaré, também chamado de grupo de Lorentz não homogêneo.
Formulação física de reforços de Lorentz
Transformação de coordenadas

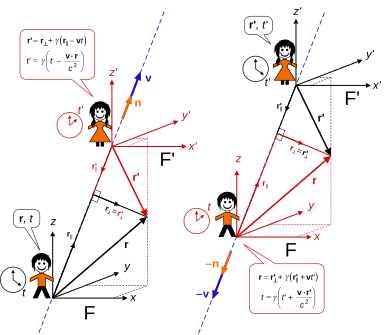
As coordenadas espaço-tempo de um evento, medida por cada observador em seu quadro de referência inercial (em configuração padrão) são mostradas nas bolhas de fala.
Topo: moldura
F? movimentos na velocidade
v ao longo da
x- eixo do quadro
F.
Parte de baixo: moldura
F move em velocidade −
v ao longo da
x?- eixo do quadro
F?.
Um "estacionário" observador no quadro F define eventos com coordenadas t, x, y, z. Outro quadro F′ se move com velocidade v em relação a F, e um observador neste "em movimento" frame F′ define eventos usando as coordenadas t′, x′, y′, z′.
Os eixos coordenados em cada quadro são paralelos (o x e o x ′ eixos são paralelos, os eixos y e y′ os eixos são paralelos e os eixos z e z′ os eixos são paralelos), permanecem mutuamente perpendiculares e o movimento relativo ocorre ao longo dos eixos xx′ coincidentes. Em t = t′ = 0, as origens de ambos os sistemas de coordenadas são as mesmas, (x, y, z) = (x′, y′, z′) = (0, 0, 0). Em outras palavras, os horários e posições são coincidentes neste evento. Se tudo isso for válido, diz-se que os sistemas de coordenadas estão na configuração padrão ou sincronizados.
Se um observador em F registrar um evento t, x, y, z, então um observador em F′< /span> registra o mesmo evento com coordenadas
Aumento de Lorentz (
x Direcção)
onde v é a velocidade relativa entre os quadros no x-direção, c é a velocidade da luz e

Aqui, v é o parâmetro da transformação, para um determinado aumento é um número constante, mas pode assumir um intervalo contínuo de valores. Na configuração usada aqui, a velocidade relativa positiva v > 0 é o movimento ao longo das direções positivas dos eixos xx′, velocidade relativa zero v = 0 não há movimento relativo, enquanto a velocidade relativa negativa v < 0 é o movimento relativo ao longo das direções negativas dos eixos xx′. A magnitude da velocidade relativa v não pode ser igual ou superior a c, portanto, apenas velocidades subluminais −c < v < c são permitidos. O intervalo correspondente de γ é 1 ≤ γ < ∞.
As transformações não são definidas se v estiver fora desses limites. Na velocidade da luz (v = c) γ é infinito e mais rápido que a luz (v > c) γ é um número complexo, cada um dos quais torna as transformações não físicas. As coordenadas de espaço e tempo são quantidades mensuráveis e numericamente devem ser números reais.
Como uma transformação ativa, um observador em F′ percebe as coordenadas do evento a serem "aumentadas" nas direções negativas dos eixos xx′, por causa do −v< /span> nas transformações. Isso tem o efeito equivalente do sistema de coordenadas F′ impulsionado nas direções positivas dos eixos xx′, enquanto o evento não muda e é simplesmente representado em outro sistema de coordenadas, uma transformação passiva.
As relações inversas (t, x, y, z em termos de t′, x′, y′, z′) pode ser encontrado resolvendo algebricamente o conjunto original de equações. Uma maneira mais eficiente é usar princípios físicos. Aqui F′ é o "estacionário" quadro enquanto F é o "em movimento" quadro. De acordo com o princípio da relatividade, não há referencial privilegiado, portanto as transformações de F′ para < i>F deve ter exatamente a mesma forma que as transformações de F para F′. A única diferença é que F se move com velocidade −v em relação a F′ (ou seja, a velocidade relativa tem a mesma magnitude, mas é oposta). Assim, se um observador em F′ anotar um evento t′, x′, y′, z′, então um observador em F observa o mesmo evento com coordenadas
Inverse Lorentz impulso (
x Direcção)

e o valor de γ permanece inalterado. Este "truque" de simplesmente inverter a direção da velocidade relativa, preservando sua magnitude e trocando variáveis com e sem preparação, sempre se aplica a encontrar a transformação inversa de cada impulso em qualquer direção.
Às vezes é mais conveniente usar β = v/c (minúsculas beta) em vez de v, para que

As transformações de Lorentz também podem ser derivadas de forma semelhante a rotações circulares no espaço 3D usando as funções hiperbólicas. Para o impulso na direção x, os resultados são
Aumento de Lorentz (
x direção com rapidez ζ)

onde ζ (zeta minúsculo) é um parâmetro chamado rapidity (muitos outros símbolos são usados, incluindo θ, ϕ, φ, η, ψ, ξ). Dada a forte semelhança com as rotações das coordenadas espaciais no espaço 3D nos planos cartesianos xy, yz e zx, um aumento de Lorentz pode ser pensado como uma rotação hiperbólica das coordenadas do espaço-tempo nos planos de tempo cartesiano xt, yt e zt de Espaço de Minkowski 4d. O parâmetro ζ é o ângulo hiperbólico de rotação, análogo ao ângulo comum para rotações circulares. Esta transformação pode ser ilustrada com um diagrama de Minkowski.
As funções hiperbólicas surgem da diferença entre os quadrados do tempo e as coordenadas espaciais no intervalo de espaço-tempo, ao invés de uma soma. O significado geométrico das funções hiperbólicas pode ser visualizado tomando x = 0 ou ct = 0 nas transformações. Elevando ao quadrado e subtraindo os resultados, pode-se derivar curvas hiperbólicas de valores de coordenadas constantes, mas variando ζ, que parametriza as curvas de acordo com a identidade

Por outro lado, os eixos ct e x podem ser construídos para coordenadas variadas, mas constante ζ. A definição


Comparando as transformações de Lorentz em termos de velocidade e rapidez relativas, ou usando as fórmulas acima, as conexões entre β, γ e ζ são

Tomar a tangente hiperbólica inversa dá a rapidez

Desde −1 < β < 1, segue −∞ < ζ < ∞. Da relação entre ζ e β, rapidez positiva ζ > 0 é o movimento ao longo das direções positivas dos eixos xx′, rapidez zero ζ = 0 não há movimento relativo, enquanto a rapidez negativa ζ < 0 é o movimento relativo ao longo das direções negativas dos eixos xx′.
As transformações inversas são obtidas pela troca de quantidades iniciadas e não iniciadas para alternar os quadros de coordenadas e negação da rapidez ζ → −ζ< /span> já que isso é equivalente a negar a velocidade relativa. Portanto,
Inverse Lorentz impulso (
x direção com rapidez ζ)

As transformações inversas podem ser visualizadas de forma semelhante considerando os casos em que x′ = 0 e ct′ = 0.
Até agora, as transformações de Lorentz foram aplicadas a um evento. Se houver dois eventos, há uma separação espacial e um intervalo de tempo entre eles. Segue-se da linearidade das transformações de Lorentz que dois valores de coordenadas de espaço e tempo podem ser escolhidos, as transformações de Lorentz podem ser aplicadas a cada um, então subtraídas para obter as transformações de Lorentz das diferenças;


onde Δ (delta maiúsculo) indica uma diferença de quantidades; por exemplo, Δx = x2 − x1< /sub> para dois valores de coordenadas x e assim por diante.
Essas transformações em diferenças em vez de pontos espaciais ou instantes de tempo são úteis por vários motivos:
- em cálculos e experimentos, é comprimentos entre dois pontos ou intervalos de tempo que são medidos ou de interesse (por exemplo, o comprimento de um veículo em movimento, ou a duração do tempo que leva para viajar de um lugar para outro),
- as transformações da velocidade podem ser facilmente derivadas, fazendo a diferença infinitassimalmente pequena e dividindo as equações, e o processo repetido para a transformação da aceleração,
- se os sistemas de coordenadas nunca forem coincidentes (ou seja, não na configuração padrão), e se ambos os observadores podem concordar em um evento )0, x0, Sim.0, zangão.0 em F e )0′, x0′, Sim.0′, zangão.0? em F?, então eles podem usar esse evento como origem, e as diferenças de coordenadas espaço-tempo são as diferenças entre suas coordenadas e essa origem, por exemplo, ?x = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = x - Sim. x0, ?x′′′= x,,,, x0?, etc.
Implicações físicas
Um requisito crítico das transformações de Lorentz é a invariância da velocidade da luz, um fato usado em sua derivação e contido nas próprias transformações. Se em F a equação para um pulso de luz ao longo do x direção é x = ct, então em F′ as transformações de Lorentz fornecem x′ = ct′, e vice-versa, para qualquer −c < v < c.
Para velocidades relativas muito inferiores à velocidade da luz, as transformações de Lorentz reduzem-se à transformação de Galileu

Três previsões contra-intuitivas, mas corretas, das transformações são:
- Relatividade da simultaneidade
- Suponha que dois eventos ocorrem ao longo do eixo x simultaneamente (?) = 0) em F, mas separados por um deslocamento nonzero ?x. Então... F?, nós achamos que
 , então os eventos não são mais simultâneos de acordo com um observador em movimento.
, então os eventos não são mais simultâneos de acordo com um observador em movimento. - Dilatação do tempo
- Suponha que haja um relógio em repouso F. Se um intervalo de tempo for medido no mesmo ponto nesse quadro, de modo que ?x = 0, então as transformações dão este intervalo em F? por ?)′′′= γ?). Por outro lado, suponha que haja um relógio em repouso F?. Se um intervalo for medido no mesmo ponto nesse quadro, de modo que ?x′′ = 0, então as transformações dão este intervalo em F por ?) = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = γ?)?. De qualquer forma, cada observador mede o intervalo de tempo entre carrapatos de um relógio em movimento para ser mais longo por um fator γ do que o intervalo de tempo entre carrapatos de seu próprio relógio.
- Contração de comprimento
- Suponha que haja uma haste em repouso F alinhado ao longo do eixo x, com comprimento ?x. Em F?, a haste se move com velocidade - Não.v, assim o seu comprimento deve ser medido, tomando dois simultâneos (?)′′ = 0) medições em extremidades opostas. Nestas condições, a transformação inversa de Lorentz mostra que ?x = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = γ?x?. Em F as duas medições não são mais simultâneas, mas isso não importa porque a haste está em repouso F. Assim, cada observador mede a distância entre os pontos finais de uma haste móvel para ser mais curto por um fator 1γ do que os pontos finais de uma haste idêntica em repouso em seu próprio quadro. A contração de comprimento afeta qualquer quantidade geométrica relacionada a comprimentos, portanto, a partir da perspectiva de um observador em movimento, áreas e volumes também aparecerão para diminuir ao longo da direção do movimento.
Transformações vetoriais
Um observador em quadro
F observa
F? para mover com velocidade
v, enquanto
F? observa
F para mover com velocidade
- Sim.v.
Os eixos de coordenadas de cada quadro ainda são paralelos e ortogonal. O vetor de posição medida em cada quadro é dividido em componentes paralelos e perpendiculares ao vetor de velocidade relativa
v.
Esquerda: Configuração padrão.
Certo. Configuração inversa.
O uso de vetores permite que posições e velocidades sejam expressas em direções arbitrárias de forma compacta. Um único impulso em qualquer direção depende do vetor de velocidade relativa total v com uma magnitude |v| = v que não pode ser igual ou superior a c, de modo que 0 ≤ v < c.
Somente o tempo e as coordenadas paralelas à direção do movimento relativo mudam, enquanto as coordenadas perpendiculares não mudam. Com isso em mente, divida o vetor de posição espacial r medido em F< /span> e r′ medido em F′, cada um em componentes perpendiculares (⊥) e paralelos (‖) a v,


Apresentando um vetor unitário n = v/v = β /β na direção do movimento relativo, a velocidade relativa é v = v< b>n com magnitude v e direção n, e projeção vetorial e rejeição dão, respectivamente,

Acumular os resultados dá as transformações completas,
Aumento de Lorentz (
em direção n com magnitude v)

A projeção e rejeição também se aplicam a r′. Para as transformações inversas, troque r e r′ para alternar coordenadas observadas e negar a velocidade relativa v → −v (ou simplesmente o vetor unitário n → −n já que a magnitude v é sempre positiva) obter
Inverse Lorentz impulso (
em direção n com magnitude v)

O vetor unitário tem a vantagem de simplificar as equações para um único aumento, permite v ou β seja restabelecido quando conveniente, e a parametrização da rapidez é obtida imediatamente substituindo β e βγ. Não é conveniente para reforços múltiplos.
A relação vetorial entre velocidade relativa e rapidez é


Transformação de velocidades

A transformação de velocidades fornece a definição de adição de velocidade relativista
⊕, a ordenação de vetores é escolhida para refletir a ordenação da adição de velocidades; primeiro
v (a velocidade de F′ em relação a F) então
u? (a velocidade de X em relação a F′) para obter
u = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = v ⊕ u? (a velocidade de X em relação a F).
Definindo as velocidades de coordenadas e o fator de Lorentz por

pegar os diferenciais nas coordenadas e no tempo das transformações vetoriais e, em seguida, dividir as equações, leva a
![{displaystyle mathbf {u} '={frac {1}{1-{frac {mathbf {v} cdot mathbf {u} }{c^{2}}}}}left[{frac {mathbf {u} }{gamma _{mathbf {v} }}}-mathbf {v} +{frac {1}{c^{2}}}{frac {gamma _{mathbf {v} }}{gamma _{mathbf {v} }+1}}left(mathbf {u} cdot mathbf {v} right)mathbf {v} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4d9ce52162b9b5960496a83093a8241a3736852c)
As velocidades u e u′ são a velocidade de algum objeto maciço. Eles também podem ser para um terceiro referencial inercial (digamos F′′), caso em que devem ser constantes. Denote qualquer uma das entidades por X. Então X se move com velocidade u em relação a F, ou equivalente com velocidade u′ em relação a F′, por sua vez F′ se move com velocidade v em relação a F. As transformações inversas podem ser obtido de maneira semelhante ou como na troca de coordenadas de posição u e u ′ e altere v para −v.
A transformação da velocidade é útil na aberração estelar, no experimento de Fizeau e no efeito Doppler relativístico.
As transformações de Lorentz da aceleração podem ser obtidas de forma semelhante tomando diferenciais nos vetores de velocidade e dividindo-os pelo diferencial de tempo.
Transformação de outras quantidades
Em geral, dadas quatro quantidades A e Z = (Zx, Zy, Zz)< /span> e suas contrapartes reforçadas por Lorentz A′ e Z′ = (Z′x, Z′y, Z′z< /sub>), uma relação da forma


A decomposição de Z (e Z′) em componentes perpendiculares e paralelas a v é exatamente o mesmo que para o vetor de posição, assim como o processo de obtenção das transformações inversas (troca (A, Z) e (A′, Z′) para mudar as quantidades observadas e inverter a direção do movimento relativo pela substituição n ↦ −n).
As quantidades (A, Z) formam coletivamente um quatro-vetor, em que A é o "componente semelhante ao tempo" e Z o "componente espacial". Exemplos de A e Z são os seguintes:
| Quatro.
| A | Z. |
|---|
| Posição quatro-vetor
| Tempo (multiplicado por c), ct | Vetor de posição, R |
| Quatro-momento
| Energia (dividida por c), E/c | Momentum, p |
| vetor de quatro ondas
| frequência angular (dividido por c), ω/c | vetor de onda, k |
| Quatro.
| (Nenhum nome), S) | Spin, S |
| Quatro-corrente
| Densidade de carga (multiplicada por c), ρc | Densidade de corrente, JJ |
| Electromagnética quatro-potencial
| Potencial elétrico (dividido por c), φ/c | Potencial de vetor magnético, A |
Para um determinado objeto (por exemplo, partícula, fluido, campo, material), se A ou < b>Z correspondem às propriedades específicas do objeto, como densidade de carga, densidade de massa, rotação, etc., suas propriedades podem ser corrigidas no quadro restante desse objeto. Em seguida, as transformações de Lorentz fornecem as propriedades correspondentes em um quadro que se move em relação ao objeto com velocidade constante. Isso quebra algumas noções dadas como certas na física não relativística. Por exemplo, a energia E de um objeto é um escalar na mecânica não relativística, mas não na mecânica relativística porque a energia muda sob as transformações de Lorentz; seu valor é diferente para vários referenciais inerciais. No referencial de repouso de um objeto, ele tem energia de repouso e momento nulo. Em um quadro impulsionado, sua energia é diferente e parece ter um momento. Da mesma forma, na mecânica quântica não relativística, o spin de uma partícula é um vetor constante, mas na mecânica quântica relativística, o spin s depende do movimento relativo. No quadro de repouso da partícula, o pseudovetor de spin pode ser fixado para ser seu spin não relativístico comum com uma quantidade similar ao tempo igual a zero st, no entanto, um observador aprimorado perceberá um componente temporal diferente de zero e um spin alterado.
Nem todas as quantidades são invariantes na forma mostrada acima, por exemplo, o momento angular orbital L não possui uma quantidade semelhante ao tempo e nem o campo elétrico E nem o campo magnético B. A definição de momento angular é L = r × p, e em um quadro impulsionado o momento angular alterado é L′ = r′ × p′. Aplicando esta definição usando as transformações de coordenadas e momento leva à transformação do momento angular. Acontece que L se transforma com outra quantidade vetorial N = (E /c2)r − tp relacionado a impulsos, consulte momento angular relativístico para obter detalhes. No caso dos campos E e B, as transformações não pode ser obtido diretamente usando álgebra vetorial. A força de Lorentz é a definição desses campos, e em F é F = q(E + v × B) enquanto em F′ é F′ = q(E′ + v′ × B′). Um método para derivar as transformações do campo EM de maneira eficiente, que também ilustra a unidade do campo eletromagnético, usa a álgebra tensorial, fornecida abaixo.
Formulação matemática
Em todo o texto, letras maiúsculas em itálico sem negrito são matrizes 4 × 4, enquanto letras em negrito sem itálico são matrizes 3 × 3.
Grupo Lorentz homogêneo
Escrevendo as coordenadas em vetores de coluna e a métrica de Minkowski η como uma matriz quadrada


