
Transformación covariante
En física, una transformación covariante es una regla que especifica cómo ciertas entidades, como vectores o tensores, cambian bajo un cambio de base. La transformación que describe los nuevos vectores base como una combinación lineal de los antiguos vectores base se define como una transformación covariante. Convencionalmente, los índices que identifican los vectores base se colocan como índices inferiores y también lo son todas las entidades que se transforman de la misma manera. La inversa de una transformación covariante es una transformación contravariante. Siempre que un vector deba ser invariante bajo un cambio de base, es decir, debe representar el mismo objeto geométrico o físico que tenga la misma magnitud y dirección que antes, sus componentes debe transformarse según la regla contravariante. Convencionalmente, los índices que identifican los componentes de un vector se colocan como índices superiores y también lo son todos los índices de entidades que se transforman de la misma manera. La suma de índices coincidentes por pares de un producto con los mismos índices inferior y superior es invariante bajo una transformación.
Un vector en sí es una cantidad geométrica, en principio, independiente (invariante) de la base elegida. Un vector v está dado, por ejemplo, en los componentes vi sobre una base elegida ei. Sobre otra base, digamos e′j, el mismo vector v tiene diferentes componentes v′j y

La transformación necesaria de v se llama regla de transformación contravariante.
Un vector vvectores de base tangente local {}ex, eSí.} y {}er, eφ} .

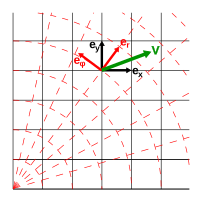
Representaciones coordinadas de v.


En el ejemplo mostrado, un vector v=.. i▪ ▪ {}x,Sí.}viei=.. j▪ ▪ {}r,φ φ }v.jej.{textstyle mathbf {v} =sum _{iin ¿Qué? }_{i}=sum _{jin {r,phi {fnMicrosoft Sans} {fnMicrosoft} es descrito por dos sistemas de coordenadas diferentes: un sistema de coordenadas rectangular (la red negra), y un sistema de coordenadas radiales (la red). Los vectores Basis han sido elegidos para ambos sistemas de coordenadas: ex y eSí. para el sistema de coordenadas rectangular, y er y eφ para el sistema de coordenadas radiales. Los vectores de base radial er y eφ aparecen girados antihorario con respecto a los vectores de base rectangular ex y eSí.. El transformación covariante, realizado a los vectores de base, es por lo tanto una rotación antiauricular, girando desde los vectores de primera base a los vectores de segunda base.

Las coordenadas de v deben transformarse al nuevo sistema de coordenadas, pero el propio vector v, como objeto matemático, permanece independiente de la base elegida, pareciendo apuntar en el misma dirección y con la misma magnitud, invariante al cambio de coordenadas. La transformación contravariante asegura esto, compensando la rotación entre las diferentes bases. Si vemos v desde el contexto del sistema de coordenadas radiales, parece estar girado más en el sentido de las agujas del reloj desde los vectores base er y eφ. en comparación con cómo apareció en relación con los vectores de base rectangular ex y ey. Por lo tanto, la transformación contravariante necesaria a v en este ejemplo es una rotación en el sentido de las agujas del reloj.
Ejemplos de transformación covariante
La derivada de una función se transforma covariantemente
La forma explícita de una transformación covariante es mejor introducida con las propiedades de transformación del derivado de una función. Considerar una función de escalar f (como la temperatura en un lugar en un espacio) definido en un conjunto de puntos p, identificable en un sistema de coordenadas dado xi,i=0,1,...... {displaystyle x^{i},;i=0,1,dots } (como una colección se llama múltiple). Si adoptamos un nuevo sistema de coordenadas x.j,j=0,1,...... {fnMicrosoft Sans Serif} entonces para cada i, la coordenadas original xi{displaystyle {x} {}} {}displaystyle {x}} {}}}} {f}} {f}}}}} {f}} se puede expresar como una función de las nuevas coordenadas, así xi()x.j),j=0,1,...... {displaystyle x^{i}left({x'}{j}right),j=0,1,dots } Uno puede expresar el derivado de f en viejas coordenadas en términos de las nuevas coordenadas, utilizando la regla de cadena del derivado, como




- ∂ ∂ f∂ ∂ xi=∂ ∂ f∂ ∂ x.j∂ ∂ x.j∂ ∂ xi{displaystyle {frac {partial f}{partial {fnK} {fnMicroc {f} {fnMicrosoft Sans Serif} {fnMicrosoft}} {fnMicroc {fnMicrosoft} {fnMicrosoft} {fnMicrosoft}} {fnK} {f}}} {fnMicroc}} {f}}}} {f} {f}}}} {f}}}}}}}}}} {f}} {f}} {f}}}}}}} {f}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}} {f}}}}}} {f}} {\f}}}}}}\\\\\\\f}}}}}}}}}}}}}\\\\\\\\\\\fn {x} {}}}}

Esta es la forma explícita de la regla de transformación covariante. La notación de una derivada normal con respecto a las coordenadas a veces utiliza una coma, como sigue
- f,i=def∂ ∂ f∂ ∂ xi{fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {f}} {f}} {f}} {f}f}}}\fnMicrosoft}} {fnMicrosoft}} {f}}}}\f}f}\fnKfnKf} {fnMicroc {fnK} {fnMicroc {fnMicroc} {f} {f} {f}} {fnMicroc {f}fnMicroc}} {fnMicroc {f}} {f}} {f}fnMicroc} {f}f}f}f}f}f}f}f}f}b}b}b}f}b}f}f}f}b}f}f}b}b}b}f}f}f}f}f}f}f}fnMicrocHb}b}b}b}b}b}b}b}f}f}f}f}b}b}f}b}b}b}b}b}f}b}b} #

donde el índice i se coloca como índice inferior, debido a la transformación covariante.
Los vectores base se transforman covariantemente
Un vector se puede expresar en términos de vectores base. Para un determinado sistema de coordenadas, podemos elegir los vectores tangentes a la cuadrícula de coordenadas. Esta base se llama base de coordenadas.
Para ilustrar las propiedades de transformación, considere nuevamente el conjunto de puntos p, identificable en un sistema de coordenadas dado xi{displaystyle x^{i} Donde i=0,1,...... {displaystyle i=0,1,dots} (Manifold). Una función de escalar f, que asigna un número real a cada punto p en este espacio, es una función de las coordenadas f()x0,x1,...... ){displaystyle f;left(x^{0},x^{1},dots right)}. Una curva es una colección de puntos de un parámetro c, digamos con el parámetro curva λ, c(λ). Un vector tangente v a la curva es el derivado dc/dλ λ {displaystyle dc/dlambda} a lo largo de la curva con el derivado tomado en el punto p en estudio. Tenga en cuenta que podemos ver tangente vector v como operador (derivado direccional) que se puede aplicar a una función




- v[f]=defdfdλ λ =ddλ λ f()c()λ λ )){displaystyle mathbf {v} [f] {fnMicrom {fnh} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft}}} {f}}}\fnMicrox}fnMicrosoft}}}}\f}f}\\f}\\\\\\\\\fnMicrob}fnMicrob}f}\\\\\\fnMicrob}}\\\\\\\\\\\\fnMicrox9\\\fnMicrox4fnMicrosoft}fnMicrosoft}fnMicrox4fnMicrox9\\\fnMicrosoft}\fnMicro {fnMicroc {f} {f} {fnMicroc} {f} {f} {f} {f}} {f}fn}f}fnMicroc}} {f}} {f} {f} {f} {f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}cf}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}cf}f}f}f}f}f}f}f}f}f}f}f}f}f}f} }={frac {d;;}{dlambda }f(c(lambda)}}
![{displaystyle mathbf {v} [f] {stackrel {mathrm {def} }{=}} {frac {df}{dlambda }}={frac {d;;}{dlambda }}f(c(lambda))}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7b9e808398a68163d26ec2d741b4c7cb0bd1cbeb)
El paralelo entre el vector tangente y el operador también se puede calcular en coordenadas
- v[f]=dxidλ λ ∂ ∂ f∂ ∂ xi{displaystyle mathbf {v} [f]={frac {dx^{i}{dlambda {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f}} {fnMicroc {f} {fnMicrosoft} {f}}}} {fnMicroc {fnMicrosoft} {fnMicroc {f}}} {fnMicroc} {f}}}}} {f}}f}}}}f}f}}f}b} {f}b}f}f}f}f}f}f}f} {fnMicrocb}f}f}f}f}f}f} {b}fnMicrocb}b}b}f}f}f}f}f}f} {f}f}b}b}b}b}b}f}f}f}f}f}fn #
![{displaystyle mathbf {v} [f]={frac {dx^{i}}{dlambda }}{frac {partial f}{partial x^{i}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fd7b922149b5cfd0c678502d086c52beb63ecb1d)
o en términos de operadores ∂ ∂ /∂ ∂ xi{displaystyle partial /partial x^{i}

- v=dxidλ λ ∂ ∂ ∂ ∂ xi=dxidλ λ ei{displaystyle mathbf {v} ={frac {dx^{i}{dlambda }{frac {partial {fnK} {f}} {fnMic {f} {f} {f} {fn} {fn}} {fnf}}} {fnfnfnfnfnfn}} {fnfnf}}} {fnfnf}}}}}}} {\\\\\\\\\\\fnfnfnfnfnfnfn\\\\\\\\\fnfn\\\fn\\\\\\\\fn\\\fn\\\fnfn\\\fnfn\\\\\\\fn\\fn\\\fn # Mathbf #

donde hemos escrito ei=∂ ∂ /∂ ∂ xi{displaystyle mathbf {e} ¿Qué? /partial x^{i}, los vectores tangentes a las curvas que son simplemente la cuadrícula de coordenadas en sí mismo.

Si adoptamos un nuevo sistema de coordenadas x.i,i=0,1,...... {fnMicrosoft Sans Serif} entonces para cada i, la antigua coordenadas xi{displaystyle {x^{i}}} se puede expresar como función del nuevo sistema, así xi()x.j),j=0,1,...... {displaystyle x^{i}left({x'}{j}right),j=0,1,dots }Vamos ei.=∂ ∂ /∂ ∂ x.i{displaystyle mathbf {e} '_{i}={partial }/{partial {x}} {}} {}}} ser la base, vectores tangentes en este nuevo sistema de coordenadas. Podemos expresar ei{displaystyle mathbf {e} _{i} en el nuevo sistema aplicando la regla de cadena x. Como función de coordenadas encontramos la siguiente transformación




- ei.=∂ ∂ ∂ ∂ x.i=∂ ∂ xj∂ ∂ x.i∂ ∂ ∂ ∂ xj=∂ ∂ xj∂ ∂ x.iej{displaystyle mathbf {e} '_{i}={frac {partial }{partial {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {x} {fn} {fnMicrosoft}} {fnMicrosoft}}} {fnMicrosoft}}}}} {fnMicroc}}}}} {fnK}}}}} {fnMicroc}}}} {fnMicroc}}} {fnMicroc} {partial }{partial {fnK} {fnMicroc {fnK} {fnMicrosoft} {fnMicrosoft} {f}} {fnMicroc}} {f} {fnMicrosoft}}} {fnMicroc {f}}}} {f}}}}}f}fnMicroc {\f}f}f}f}\\f}\f}fnMicrocf}f}f}f}f}f}f}f}f}f}\\f}f}f}\\\f}f}f}fnMicrocfnMicroc\\\\\\\\\f}f}\f}\\fnMicrocfn\\\\\\\\\f}fn {fnMicrosoft Sans Serif}

que de hecho es lo mismo que la transformación covariante para la derivada de una función.
Transformación contravariante
El componentes de un vector (tangente) transformado de una manera diferente, llamado transformación contravariante. Considere un vector tangente v y llamar a sus componentes vi{displaystyle v^{i} sobre una base ei{displaystyle mathbf {e} _{i}. Sobre otra base ei.{displaystyle mathbf {e} ' llamamos a los componentes v.i{fnMicrosoft Sans Serif}Así que



- v=viei=v.iei.{displaystyle mathbf {v} =v^{i}mathbf {e} _{i}={i} {i}mathbf {e} {i} {i} {}} {i}} {i} {i} {i}}} {i} {i}}i}} {i}}}}} {}}}} {}}}}}}} {}}}}}}}}} {}}}}}}}} {}}}}}}}} {}}}}}}}}}} {}}}}}}} {}}}}}}}}}}}} {}}}}}}}}}}} {}}}}}}} {}}}}}}}}}}}}}} {}}}}}}}}}} {}}}}}}}}}}}}}}} {}}}}}}}}}}}}}}}}}}}}}}}}

en el cual
- vi=dxidλ λ yv.i=dx.idλ λ {displaystyle v^{i}={frac {dx^{i}{dlambda };{mbox{ y }};{v'}={frac {d{x}{i}{dlambda }

Si expresamos los nuevos componentes en términos de los antiguos, entonces
- v.i=dx.idλ λ =∂ ∂ x.i∂ ∂ xjdxjdλ λ =∂ ∂ x.i∂ ∂ xjvj{fnMicrosoft Sans Serif} {fnK} {fnMicrosoft} {fnMicrosoft} {fn}} {fnK}}} {fnK}} {fnK}} {fnK}}} {f}}} {f}}}} {fnfnf}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}} {f}}}}}}}}}}}}}}} {f} {f} {f}}} {fnf}}}}}}}}}}}}}}}}}}}} {fnf}}}}}}} {fnf}}fnfnfnf}}}}}}}}}}fnfnfnfnfnf}}}}}}}}}}}}}}} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif}} {f} {fnMicrosoft}} {fnMicrosoft Sans Serif}} {fnMicros} {\fnMicros} {\fnMicrocfnMicrosoft}}} {f}}}}}}} {\\\\\fnMicroc\\fnMicrocfnMicroc\\\fnMicrocfnMicroc\fnMicrocfnMicroc\fn\\\\\\\\\\\\\\\\\\fnMicroc\fnMicrocH\\\\\\\\\\fnMicroc\fnMicro {fnK} {f} {fnK} {fnK}} {fnK}}} {f}} {fn}} {fn}} {fn}} {fnK}}}} {fn}}}} {fnK}} {f}}} {fnKf}}}}} {f}}}}}}}}}} {f}f}}}}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}fnKf}fnKf}fnKf}f}fnfnKf}f}fnfnKfnKfnKf}fnKf}fnKf}}fnK {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif}} {f}} {fn}} {fnMicrosoft}}}} {fnMicroc {fnMicros {fnMicrosoft {fnMicrosoft}}}}}}} {f}}}}}} {f}}}}}}} {f}}}}}} {f}}}}} {f}f}f}f} {f} {f}fnMicrocf}f}f}f}f}f}f}fnMicrocfnMicrocfnMicroc {fn\\fnfnfnf}fnfnfnfnfnfnfnfnfnfnfnf}fn ¿Qué?

Esta es la forma explícita de una transformación llamada transformación contravariante y observamos que es diferente y justo la inversa de la regla covariante. Para distinguirlos de los vectores covariantes (tangentes), el índice se coloca en la parte superior.
Did you mean:Differential forms transform contravariant
Un ejemplo de transformación contravariante es dado por una forma diferencial df. Para f como función de las coordenadas xi{displaystyle x^{i}, df se puede expresar en términos de dxi{displaystyle dx^{i}. Las diferencias dx transformar según la norma contravariante desde

- dx.i=∂ ∂ x.i∂ ∂ xjdxj{fnMicrosoft Sans Serif} {fnMicroc} {fnMicrosoft Sans} {fnMicrosoft}} {fnMicrosoft}} {fnMicrosoft}}}} {fn}}}} {f}}} {fnK}}}} {fnK}}}}}}} {f}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {}}}}}}}} {}}}}}}}}}}}}}}}}}}}}}}} {}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {

Propiedades duales
Las entidades que se transforman covariantemente (como vectores base) y las que se transforman contravariantemente (como componentes de un vector y formas diferenciales) son "casi iguales" y sin embargo son diferentes. Tienen "doble" propiedades. Lo que hay detrás de esto se conoce matemáticamente como el espacio dual que siempre va junto con un espacio vectorial lineal dado.
Tome cualquier espacio vectorial T. Una función f en T se llama lineal si, para cualquier vector v, w y escalar α:
- f()v+w)=f()v)+f()w)f()α α v)=α α f()v){displaystyle {begin{aligned}f(mathbf {v} +mathbf {w}) limit=f(mathbf {v})+f(mathbf {w})f(alpha mathbf {v})}

Un ejemplo sencillo es la función que asigna a un vector el valor de uno de sus componentes (llamada función de proyección). Tiene un vector como argumento y asigna un número real, el valor de un componente.
Todas estas funciones lineales con valores escalares juntas forman un espacio vectorial, llamado espacio dual de T. La suma f+g es nuevamente una función lineal para f lineal y g, y lo mismo se aplica a la multiplicación escalar αf.
Dada la base ei{displaystyle mathbf {e} _{i} para T, podemos definir una base, llamada el doble base para el espacio dual de manera natural, tomando el conjunto de funciones lineales mencionadas anteriormente: las funciones de proyección. Cada función de proyección (indexada por ω) produce el número 1 cuando se aplica a uno de los vectores de base ei{displaystyle mathbf {e} _{i}. Por ejemplo, ⋅ ⋅ 0{displaystyle omega ^{0} da 1 en e0{displaystyle mathbf {e} ¿Qué? y cero en otro lugar. Aplicar esta función lineal ⋅ ⋅ 0{displaystyle {omega }}} {}} a un vector v=viei{displaystyle mathbf {v} =v^{i}mathbf {e} _{i}, da (utilizando su linearidad)




- ⋅ ⋅ 0()v)=⋅ ⋅ 0()viei)=vi⋅ ⋅ 0()ei)=v0{displaystyle omega ^{0}(mathbf {v})=omega ^{0}(v^{i}mathbf {e} _{i})=v^{i}omega ^{0}(mathbf {e} _{i})=v^{0}}} {0}} {}}} {}} {}} {}}} {}}}}}}}} {}}}} {}}}}}} {}}}}}} {}}} {}}}}}}}}}}}} {m} {}}}}}} {}}}}}}} {}}}}}}} {m} {} {}}}}}}}}}}}} {f}}} {f}}}}}}}}}} {}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {

entonces solo el valor de la primera coordenada. Por este motivo se denomina función de proyección.
Hay tantos vectores de base dual ⋅ ⋅ i{displaystyle omega ^{i} como hay vectores de base ei{displaystyle mathbf {e} _{i}, por lo que el espacio dual tiene la misma dimensión que el espacio lineal en sí mismo. Es "casi el mismo espacio", excepto que los elementos del espacio dual (llamados vectores duales) transformar covariantemente y los elementos del espacio vectorial tangente se transforman contravariantemente.

A veces se introduce una notación adicional donde el valor real de una función lineal σ en un vector tangente u se da como
- σ σ [u]:=.. σ σ ,u.. {displaystyle sigma [mathbf {u}]:=langle sigmamathbf {u} rangle }
![{displaystyle sigma [mathbf {u} ]:=langle sigmamathbf {u} rangle }](https://wikimedia.org/api/rest_v1/media/math/render/svg/f19c896b644346ac7a50a246c76519e688769087)
Donde .. σ σ ,u.. {displaystyle langle sigmamathbf {u} rangle } es un número real. Esta notación enfatiza el carácter bilineal de la forma. Es lineal en σ ya que es una función lineal y es lineal en u ya que es un elemento de un espacio vectorial.

Componentes tensoriales covariantes y contravariantes
Sin coordenadas
Un tensor de tipo (r, s) puede definirse como una función multilineal de valor real de vectores duales r y vectores s. Dado que los vectores y los vectores duales pueden definirse sin depender de un sistema de coordenadas, un tensor definido de esta manera es independiente de la elección de un sistema de coordenadas.
La notación de un tensor es
- T()σ σ ,...... ,*** *** ,u,...... ,v)↑ ↑ Tσ σ ...... *** *** u...... v{displaystyle {begin{aligned} âTMasigmaldotsrhomathbf {u}ldotsmathbf {v}right)\equiv {}{T^{sigma ldots rho }_{mathbf {u} ldots mathbf {v} }end{aligned}}

para vectores duales (formas diferenciales) ***, σ y vectores tangentes u,v{displaystyle mathbf {u}mathbf {v}. En la segunda notación la distinción entre vectores y formas diferenciales es más obvia.

Con coordenadas
Porque un tensor depende linealmente de sus argumentos, está completamente determinado si uno conoce los valores sobre una base ⋅ ⋅ i...... ⋅ ⋅ j{displaystyle omega ^{i}ldots omega ^{j} y ek...... el{displaystyle mathbf {e} ¿Qué?


- T()⋅ ⋅ i,...... ,⋅ ⋅ j,ek...... el)=Ti...... jk...... l{displaystyle T(omega ^{i},ldotsomega ^{j},mathbf {e} ¿Por qué? ¿Qué?

Los números Ti...... jk...... l{displaystyle {T^{ildots ¿Qué? son llamados componentes del tensor sobre la base elegida.

Si elegimos otra base (que es una combinación lineal de la base original), podemos usar las propiedades lineales del tensor y encontraremos que los componentes del tensor en los índices superiores se transforman como vectores duales (por lo tanto, contravariantes), mientras que los índices inferiores se transformarán como base de vectores tangentes y, por tanto, son covariantes. Para un tensor de rango 2, podemos verificar que
- A.ij=∂ ∂ xl∂ ∂ x.i∂ ∂ xm∂ ∂ x.jAlm{displaystyle {fnK} {fnMicroc {fnK} {fnMicrosoft} {fnMicrosoft} {f}} {fnMicrosoft}}} {f}} {fnMicrosoft}} {f}}} {fnMicroc {f} {fnMicroc}}} {f}}}}} {f}}}}}\\f}\\f}f}f}f}\f}f}f}f}f}f}f}f}\f}f}f}\\\f}f}\\f}\f}f}f}f}f}\\\\f}f}f}f}f}\fnMicrocHf}f}f}\\\f}\\\fn {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f}} {fnMicrosoft} {fnMicrosoft Sans Serif} {fnMicrosoft}} {fnK}}}} {fnMicroc {fnMicrosoft} {f}}}}}}}}}}} {f}}}}}}}}}}}}}}}}} {f}}}}}}}}}} {f} {f} {f} {f}f}f}}}}}}}f}f}f}f}f}f}f}f}f}f}f}f}fnf}f}f}f}f}fnMicrocfnMicrocf}f}f}fnMicrocf}fn {x} {fn}}A_{lm}} covariante tensor
- A.ij=∂ ∂ x.i∂ ∂ xl∂ ∂ x.j∂ ∂ xmAlm{displaystyle {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f} {fnMicros {fnMicrosoft} {fnMicrosoft} {fnK}} {fnK}} {fnMicroc} {fnMicrosoft} {f}}}} {f}}}} {f}}}}}}}} {f}}}}} {f}} {f} {f}}}}}}}}}}} {f}}}}}}}}f}}}}}}}} {f} {f} {f} {f}}}}}}}}}} {f}f}}f}f}f}f}}f}f}}fnfnfnf}}f}f}f}f}f}}}fn ¿Qué? contravariante tensor


Para un tensor mixto covariante y contravariante de rango 2
- A.ij=∂ ∂ x.i∂ ∂ xl∂ ∂ xm∂ ∂ x.jAlm{displaystyle {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnK} {fnMicrosoft} {fnMicrosoft} {fnMicrosoft} {f} {fn}} {fn}}} {fnMicrosoft}}} {fnMicrosoft}}}}}} {f}}}} {f}}}}} {fnMicrono}}}}}}}}}}}}}}}}} { {fnMicrosoft Sans Serif} mixto co- y contravariante tensor

Contenido relacionado
Colegio Robinson, Cambridge
Masa no suspendida
Thomas Davenport (inventor)