
Superficie (topología)

En la parte de las matemáticas denominada topología, una superficie es una variedad bidimensional. Algunas superficies surgen como límites de sólidos tridimensionales; por ejemplo, la esfera es el límite de la bola sólida. Otras superficies surgen como gráficas de funciones de dos variables; Vea la figura de la derecha. Sin embargo, las superficies también se pueden definir de forma abstracta, sin referencia a ningún espacio ambiental. Por ejemplo, la botella de Klein es una superficie que no se puede incrustar en el espacio euclidiano tridimensional.
Las superficies topológicas a veces están equipadas con información adicional, como una métrica de Riemann o una estructura compleja, que las conecta con otras disciplinas dentro de las matemáticas, como la geometría diferencial y el análisis complejo. Las diversas nociones matemáticas de superficie se pueden utilizar para modelar superficies en el mundo físico.
En general
En matemáticas, una superficie es una forma geométrica que se parece a un plano deformado. Los ejemplos más familiares surgen como límites de objetos sólidos en el espacio euclidiano tridimensional ordinario R3, como esferas. La definición exacta de una superficie puede depender del contexto. Por lo general, en geometría algebraica, una superficie puede cruzarse a sí misma (y puede tener otras singularidades), mientras que, en topología y geometría diferencial, puede que no.
Una superficie es un espacio bidimensional; esto significa que un punto en movimiento sobre una superficie puede moverse en dos direcciones (tiene dos grados de libertad). En otras palabras, alrededor de casi todos los puntos, hay un parche de coordenadas en el que se define un sistema de coordenadas bidimensional. Por ejemplo, la superficie de la Tierra se parece (idealmente) a una esfera bidimensional, y la latitud y la longitud proporcionan coordenadas bidimensionales (excepto en los polos ya lo largo del meridiano 180).
El concepto de superficie se usa mucho en física, ingeniería, gráficos por computadora y muchas otras disciplinas, principalmente para representar las superficies de objetos físicos. Por ejemplo, al analizar las propiedades aerodinámicas de un avión, la consideración central es el flujo de aire a lo largo de su superficie.
Definiciones y primeros ejemplos
Una superficie (topológica) es un espacio topológico en el que cada punto tiene un vecindario abierto homeomorfo a algún subconjunto abierto del plano euclidiano E2. Tal vecindad, junto con el homeomorfismo correspondiente, se conoce como gráfico (de coordenadas). Es a través de este gráfico que el vecindario hereda las coordenadas estándar en el plano euclidiano. Estas coordenadas se conocen como coordenadas locales y estos homeomorfismos nos llevan a describir superficies como localmente euclidianas.
En la mayoría de los escritos sobre el tema, a menudo se supone, explícita o implícitamente, que, como espacio topológico, una superficie también es no vacía, segundo numerable y Hausdorff. También se supone a menudo que las superficies bajo consideración están conectadas.
El resto de este artículo asumirá, a menos que se especifique lo contrario, que una superficie no es vacía, Hausdorff, segunda contable y conectada.
Más generalmente, una superficie (topológica) con límite es un espacio topológico de Hausdorff en el que cada punto tiene un vecindario abierto homeomorfo a algún subconjunto abierto del cierre del semiplano superior H2 en C. Estos homeomorfismos también se conocen como gráficos (de coordenadas). El límite del semiplano superior es el eje x. Un punto en la superficie mapeada a través de un gráfico en el eje x se denomina punto límite. El conjunto de tales puntos se conoce como el límite de la superficie que es necesariamente una multiplicidad uno, es decir, la unión de curvas cerradas. Por otro lado, un punto mapeado arriba del eje x es un punto interior. La colección de puntos interiores es el interior de la superficie que siempre está no vacía. El disco cerrado es un ejemplo simple de una superficie con límite. El límite del disco es un círculo.
El término superficie usado sin calificación se refiere a superficies sin límite. En particular, una superficie con contorno vacío es una superficie en el sentido habitual. Una superficie con un límite vacío que es compacta se conoce como superficie 'cerrada' superficie. La esfera bidimensional, el toro bidimensional y el plano proyectivo real son ejemplos de superficies cerradas.
La cinta de Möbius es una superficie en la que la distinción entre el sentido de las agujas del reloj y el sentido contrario a las agujas del reloj se puede definir localmente, pero no globalmente. En general, se dice que una superficie es orientable si no contiene una copia homeomorfa de la tira de Möbius; intuitivamente, tiene dos "lados" distintos. Por ejemplo, la esfera y el toro son orientables, mientras que el plano proyectivo real no lo es (porque el plano proyectivo real con un punto eliminado es homeomorfo a la tira abierta de Möbius).
En geometría diferencial y algebraica, se agrega una estructura adicional a la topología de la superficie. Esta estructura añadida puede ser una estructura de suavidad (permitiendo definir mapas diferenciables hacia y desde la superficie), una métrica riemanniana (permitiendo definir longitudes y ángulos en la superficie), una estructura compleja (permitiendo definir mapas holomorfos mapas hacia y desde la superficie, en cuyo caso la superficie se denomina superficie de Riemann), o una estructura algebraica (que permite detectar singularidades, como autointersecciones y cúspides, que no pueden describirse únicamente en términos de la topología subyacente).
Superficies e incrustaciones definidas extrínsecamente

Históricamente, las superficies se definieron inicialmente como subespacios de espacios euclidianos. A menudo, estas superficies eran el lugar geométrico de los ceros de ciertas funciones, generalmente funciones polinómicas. Tal definición consideraba la superficie como parte de un espacio mayor (euclidiano), y como tal se denominó extrínseco.
En la sección anterior, una superficie se define como un espacio topológico con ciertas propiedades, a saber, Hausdorff y localmente euclidiana. Este espacio topológico no se considera un subespacio de otro espacio. En este sentido, la definición dada anteriormente, que es la que usan los matemáticos en la actualidad, es intrínseca.
No se requiere una superficie definida como intrínseca para satisfacer la restricción adicional de ser un subespacio del espacio euclidiano. Puede parecer posible que algunas superficies definidas intrínsecamente no sean superficies en el sentido extrínseco. Sin embargo, el teorema de incrustación de Whitney afirma que, de hecho, todas las superficies pueden incrustarse homeomórficamente en el espacio euclidiano, de hecho en E4: los enfoques extrínseco e intrínseco resultan ser equivalentes.
De hecho, cualquier superficie compacta que sea orientable o tenga un límite se puede incrustar en E3; por otro lado, el plano proyectivo real, que es compacto, no orientable y sin límite, no se puede incrustar en E3 (ver Gramain). Las superficies de Steiner, incluida la superficie de Boy, la superficie romana y la tapa cruzada, son modelos del plano proyectivo real en E3, pero solo la superficie de Boy es una superficie sumergida. Todos estos modelos son singulares en los puntos donde se cruzan entre sí.
La esfera con cuernos de Alejandro es una incrustación patológica bien conocida de las dos esferas en las tres esferas.

La incrustación elegida (si la hay) de una superficie en otro espacio se considera información extrínseca; no es esencial para la superficie en sí. Por ejemplo, un toro se puede incrustar en E3 en el "estándar" (que parece un bagel) o de forma anudada (ver figura). Los dos toros incrustados son homeomorfos, pero no isotópicos: son topológicamente equivalentes, pero sus incrustaciones no lo son.
La imagen de una función inyectiva continua de R2 a Rn de mayor dimensión se dice ser una superficie paramétrica. Tal imagen se llama así porque las direcciones x- e y- del dominio R2 son 2 variables que parametrizan la imagen. Una superficie paramétrica no necesita ser una superficie topológica. Una superficie de revolución puede verse como un tipo especial de superficie paramétrica.
Si f es una función suave de R3 a R cuyo gradiente no es cero en ninguna parte, entonces el el lugar geométrico de los ceros de f define una superficie, conocida como superficie implícita. Si se elimina la condición de gradiente que no desaparece, entonces el lugar geométrico cero puede desarrollar singularidades.
Construcción a partir de polígonos
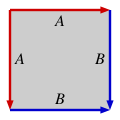
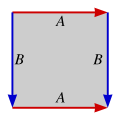
Cada superficie cerrada se puede construir a partir de un polígono orientado con un número par de lados, llamado polígono fundamental de la superficie, mediante la identificación por pares de sus bordes. Por ejemplo, en cada polígono a continuación, adjunte los lados con etiquetas coincidentes (A con A, B con B), de modo que las flechas apunten en la misma dirección, se obtiene la superficie indicada.
esfera

plano proyector real
torus

Klein bottle




Cualquier polígono fundamental se puede escribir simbólicamente de la siguiente manera. Comience en cualquier vértice y continúe alrededor del perímetro del polígono en cualquier dirección hasta regresar al vértice inicial. Durante este recorrido, registre la etiqueta en cada borde en orden, con un exponente de -1 si el borde apunta en dirección opuesta a la dirección del recorrido. Los cuatro modelos anteriores, cuando se recorren en el sentido de las agujas del reloj comenzando en la parte superior izquierda, producen
- esfera:
- plano proyector real:
- torus:
- Klein bottle: .




Tenga en cuenta que la esfera y el plano proyectivo se pueden realizar como cocientes del 2-ágono, mientras que el toro y la botella de Klein requieren un 4-ágono (cuadrado).
La expresión así derivada de un polígono fundamental de una superficie resulta ser la única relación en una presentación del grupo fundamental de la superficie con las etiquetas de borde de polígono como generadores. Esta es una consecuencia del teorema de Seifert-van Kampen.
Pegar bordes de polígonos es un tipo especial de proceso de espacio cociente. El concepto de cociente se puede aplicar con mayor generalidad para producir construcciones de superficies nuevas o alternativas. Por ejemplo, el plano proyectivo real se puede obtener como el cociente de la esfera al identificar todos los pares de puntos opuestos en la esfera. Otro ejemplo de un cociente es la suma conectada.
Sumas conectadas
La suma conectada de dos superficies M y N, denotado M # N, se obtiene mediante la eliminación de un disco de cada uno de ellos y pegarlos a lo largo de los componentes de límites que resultan. El límite de un disco es un círculo, por lo que estos componentes de límites son círculos. La característica de Euler de M # N es la suma de las características de Euler de los sumos, menos dos:


La esfera S es un elemento de identidad para la suma conectada, lo que significa que S # M = M. Esto se debe a que al eliminar un disco de la esfera, queda un disco, que simplemente reemplaza el disco eliminado de M al pegarlo.
La suma conectada con el toroide T también se describe como adjuntar un "mango" al otro sumando M. Si M es orientable, entonces también lo es T # M. La suma conexa es asociativa, por lo que la suma conexa de una colección finita de superficies está bien definida.
La suma conectada de dos planos proyectivos reales, P # P, es la botella de Klein K . La suma conexa del plano proyectivo real y la botella de Klein es homeomorfa a la suma conexa del plano proyectivo real con el toro; en una fórmula, P # K = P # T. Así, la suma conexa de tres planos proyectivos reales es homeomorfa a la suma conexa del plano proyectivo real con el toro. Cualquier suma conexa que involucre un plano proyectivo real no es orientable.
Superficies cerradas
Una superficie cerrada es una superficie compacta y sin límites. Los ejemplos de superficies cerradas incluyen la esfera, el toro y la botella de Klein. Los ejemplos de superficies no cerradas incluyen un disco abierto (que es una esfera con un pinchazo), un cilindro (que es una esfera con dos pinchazos) y la tira de Möbius.
Una superficie incrustada en espacio tridimensional está cerrada si y sólo si es el límite de un sólido. Como con cualquier manifold cerrado, una superficie incrustada en el espacio euclidiano que está cerrada con respecto a la topología euclidiana heredada es no necesariamente una superficie cerrada; por ejemplo, un disco incrustado en que contiene su límite es una superficie que está cerrada topológicamente pero no una superficie cerrada.

Clasificación de superficies cerradas

El teorema de clasificación de superficies cerradas establece que cualquier superficie cerrada conectada es homeomorfa a algún miembro de una de estas tres familias:
- la esfera,
- la suma conectada g tori for g ≥ 1,
- la suma conectada k planos reales de proyecto para k ≥ 1.
Las superficies de las dos primeras familias son orientables. Es conveniente combinar las dos familias considerando la esfera como la suma conexa de 0 tori. El número g de toros involucrados se denomina género de la superficie. La esfera y el toro tienen las características de Euler 2 y 0, respectivamente, y en general la característica de Euler de la suma conexa de g tori es 2 − 2g .
Las superficies de la tercera familia no son orientables. La característica de Euler del plano proyectivo real es 1, y en general la característica de Euler de la suma conexa de k de ellos es 2 − k.
Se sigue que una superficie cerrada está determinada, hasta el homeomorfismo, por dos datos: su característica de Euler y si es orientable o no. En otras palabras, la característica de Euler y la orientabilidad clasifican completamente las superficies cerradas hasta el homeomorfismo.
Las superficies cerradas con múltiples componentes conectados se clasifican por la clase de cada uno de sus componentes conectados y, por lo tanto, generalmente se supone que la superficie está conectada.
Estructura monoide
Relacionando esta clasificación con sumas conexas, las superficies cerradas hasta el homeomorfismo forman un monoide conmutativo bajo la operación de suma conexa, como de hecho lo hacen las variedades de cualquier dimensión fija. La identidad es la esfera, mientras que el plano proyectivo real y el toro generan este monoide, con una sola relación P # P # P = P # T, que también puede escribirse P # K = P # T, ya que K = P # P. Esta relación a veces se conoce como Teorema de Dyck< /span> después de Walther von Dyck, quien lo demostró en (Dyck 1888), y la superficie de triple cruz P # P # P se denomina en consecuencia Superficie de Dyck.
Geométricamente, connect-sum con un toro (# T) agrega un asa con ambos extremos unidos al mismo lado de la superficie, mientras que connect-sum con una botella de Klein (# K) agrega un asa con los dos extremos unidos a lados opuestos de una superficie orientable; en presencia de un plano proyectivo (# P), la superficie no es orientable (no hay noción de lado), por lo que no hay diferencia entre adjuntar un toro y adjuntar una botella de Klein, lo que explica la relación.
Prueba
La clasificación de superficies cerradas se conoce desde la década de 1860, y hoy en día existen varias pruebas.
Las pruebas topológicas y combinatorias en general se basan en el difícil resultado de que toda variedad compacta de 2 es homeomorfa a un complejo simplicial, que es de interés por derecho propio. La prueba más común de la clasificación es (Seifert & Threlfall 1934), que lleva cada superficie triangulada a una forma estándar. John H. Conway descubrió una prueba simplificada, que evita una forma estándar, alrededor de 1992, a la que llamó "Prueba de irrelevancia cero" o "ZIP prueba" y se presenta en (Francis & Weeks 1999).
Una prueba geométrica, que produce un resultado geométrico más sólido, es el teorema de uniformización. Esto fue probado originalmente solo para superficies de Riemann en las décadas de 1880 y 1900 por Felix Klein, Paul Koebe y Henri Poincaré.
Superficies con límite
Las superficies compactas, posiblemente con límite, son simplemente superficies cerradas con un número finito de orificios (discos abiertos que se han eliminado). Por lo tanto, una superficie compacta conectada se clasifica por el número de componentes de contorno y el género de la superficie cerrada correspondiente; de manera equivalente, por el número de componentes de contorno, la orientabilidad y la característica de Euler. El género de una superficie compacta se define como el género de la superficie cerrada correspondiente.
Esta clasificación se deriva casi inmediatamente de la clasificación de superficies cerradas: al quitar un disco abierto de una superficie cerrada, se obtiene una superficie compacta con un círculo como componente límite, y al quitar k discos abiertos, se obtiene una superficie compacta. con k círculos disjuntos para componentes de contorno. Las ubicaciones precisas de los agujeros son irrelevantes, porque el grupo de homeomorfismos actúa k-transitivamente en cualquier variedad conectada de dimensión al menos 2.
Por el contrario, el límite de una superficie compacta es una variedad unitaria cerrada y, por lo tanto, es la unión disjunta de un número finito de círculos; llenar estos círculos con discos (formalmente, tomando el cono) produce una superficie cerrada.
La única superficie compacta orientable del género g y con k Los componentes de límites a menudo se denotan por ejemplo en el estudio del grupo de clase cartográfica.

Superficies no compactas
Las superficies no compactas son más difíciles de clasificar. Como ejemplo simple, se puede obtener una superficie no compacta perforando (eliminando un conjunto finito de puntos de) una variedad cerrada. Por otro lado, cualquier subconjunto abierto de una superficie compacta es en sí misma una superficie no compacta; considere, por ejemplo, el complemento de un conjunto de Cantor en la esfera, también conocido como la superficie del árbol de Cantor. Sin embargo, no todas las superficies no compactas son un subconjunto de una superficie compacta; dos contraejemplos canónicos son la escalera de Jacob y el monstruo del Lago Ness, que son superficies no compactas con género infinito.
Una superficie no compacta M tiene un espacio no vacío de extremos E(M), que informalmente hablando describe las formas en que la superficie "se va al infinito". El espacio E(M) siempre es topológicamente equivalente a un subespacio cerrado del conjunto de Cantor. M puede tener un número finito o contablemente infinito Nh de identificadores, así como un número finito o contablemente infinito Np de planos proyectivos. Si tanto Nh como Np son finito, entonces estos dos números, y el tipo topológico de espacio de extremos, clasifican la superficie M hasta la equivalencia topológica. Si uno o ambos Nh y Np es infinito, entonces el tipo topológico de M depende no solo de estos dos números sino también de cómo el infinito se acerca al espacio de los extremos. En general, el tipo topológico de M está determinado por los cuatro subespacios de E(M) que son puntos límite de infinitas manijas e infinitos planos proyectivos, puntos límite de solo manijas, puntos límite de solo planos proyectivos y puntos límite de ninguno.
Asunción de segunda contabilidad
Si se elimina la suposición de contabilidad secundaria de la definición de una superficie, existen superficies topológicas (necesariamente no compactas) que no tienen una base contable para su topología. Quizás el ejemplo más simple es el producto cartesiano de la línea larga con el espacio de los números reales.
Otra superficie que no tiene una base contable para su topología, pero que no requiere el axioma de elección para probar su existencia, es la variedad de Prüfer, que puede describirse mediante ecuaciones simples que muestran que es una superficie real-analítica. La variedad de Prüfer puede considerarse como el semiplano superior junto con una "lengua" Tx colgando directamente debajo del punto (x,0), para cada real x.
En 1925, Tibor Radó demostró que todas las superficies de Riemann (es decir, las variedades complejas unidimensionales) son necesariamente contables en segundo lugar (teorema de Radó). Por el contrario, si se reemplazan los números reales en la construcción de la superficie de Prüfer por los números complejos, se obtiene una variedad compleja bidimensional (que es necesariamente una variedad real de 4 dimensiones) sin base contable.
Superficies en geometría
Los poliedros, como el límite de un cubo, se encuentran entre las primeras superficies encontradas en la geometría. También es posible definir superficies lisas, en las que cada punto tiene una vecindad difeomorfa a algún conjunto abierto en E2. Esta elaboración permite aplicar el cálculo a las superficies para probar muchos resultados.
Dos superficies lisas son difeomorfas si y solo si son homeomorfas. (El resultado análogo no es válido para variedades de dimensiones superiores). Por lo tanto, las superficies cerradas se clasifican hasta el difeomorfismo por su característica de Euler y su orientabilidad.
Las superficies lisas equipadas con métricas de Riemann tienen una importancia fundamental en la geometría diferencial. Una métrica riemanniana dota a una superficie de nociones de geodésica, distancia, ángulo y área. También da lugar a la curvatura gaussiana, que describe cuán curvada o doblada está la superficie en cada punto. La curvatura es una propiedad geométrica rígida, en el sentido de que los difeomorfismos generales de la superficie no la conservan. Sin embargo, el famoso teorema de Gauss-Bonnet para superficies cerradas establece que la integral de la curvatura gaussiana K sobre toda la superficie S está determinada por la característica de Euler:

Este resultado ejemplifica la profunda relación entre la geometría y la topología de las superficies (y, en menor medida, las variedades de mayor dimensión).
Otra forma en que surgen superficies en geometría es pasando al dominio complejo. Una variedad unicompleja es una superficie orientada suave, también llamada superficie de Riemann. Cualquier curva algebraica no singular compleja vista como una variedad compleja es una superficie de Riemann. De hecho, toda superficie orientable compacta es realizable como una superficie de Riemann. Así, las superficies compactas de Riemann se caracterizan topológicamente por su género: 0, 1, 2,.... Por otro lado, el género no caracteriza la estructura compleja. Por ejemplo, hay innumerables superficies de Riemann compactas no isomórficas del género 1 (las curvas elípticas).
Estructuras complejas en una superficie orientada cerrada corresponden a clases de equivalencia conforme de métricas riemannianas en la superficie. Una versión del teorema de uniformización (debido a Poincaré) establece que cualquier métrica de Riemann en una superficie cerrada orientada es conformemente equivalente a una métrica esencialmente única de curvatura constante. Esto proporciona un punto de partida para uno de los enfoques de la teoría de Teichmüller, que proporciona una clasificación más fina de las superficies de Riemann que la topológica por la característica de Euler sola.
Una superficie compleja es una bivariedad compleja y, por lo tanto, una cuádruple real; no es una superficie en el sentido de este artículo. Tampoco se definen curvas algebraicas sobre campos distintos de los números complejos, ni se definen superficies algebraicas sobre campos que no sean los números reales.
Contenido relacionado
Filosofía de la Aritmética (Libro)
Primos Safe y Sophie Germain
Primo de Mersenne