
Red (grupo)
En geometría y teoría de grupos, una red, red diagonal o enrejado en el espacio de coordenadas real 

Los retículos tienen muchas aplicaciones significativas en matemáticas puras, particularmente en relación con el álgebra de Lie, la teoría de números y la teoría de grupos. También surgen en las matemáticas aplicadas en relación con la teoría de la codificación, en la criptografía debido a la supuesta dureza computacional de varios problemas de red y se utilizan de diversas formas en las ciencias físicas. Por ejemplo, en la ciencia de los materiales y la física del estado sólido, una red es sinónimo del "marco de trabajo" de una estructura cristalina, una matriz tridimensional de puntos espaciados regularmente que coinciden en casos especiales con las posiciones del átomo o la molécula en un cristal.. De manera más general, los modelos de celosía se estudian en física, a menudo mediante técnicas de física computacional.
Consideraciones y ejemplos de simetría
Una red es el grupo de simetría de simetría traslacional discreta en n direcciones. Un patrón con este entramado de simetría traslacional no puede tener más, pero puede tener menos simetría que el entramado mismo. Como grupo (dejando de lado su estructura geométrica), una red es un grupo abeliano libre generado finitamente y, por lo tanto, isomorfo a 
Una red en el sentido de una matriz tridimensional de puntos espaciados regularmente que coinciden, por ejemplo, con las posiciones del átomo o la molécula en un cristal, o más generalmente, la órbita de un grupo de acción bajo simetría de traslación, es una traducción de la red de traslación: a coset, que no necesita contener el origen, y por lo tanto no necesita ser una red en el sentido anterior.
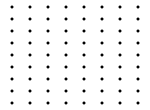
Un ejemplo simple de una red en 


Dividir el espacio según una celosía
Una red típica 

donde { v 1,..., v n } es una base para
Puntos de celosía en conjuntos convexos
El teorema de Minkowski relaciona el número d(Λ) y el volumen de un conjunto simétrico convexo S con el número de puntos de red contenidos en S. El número de puntos de red contenidos en un politopo cuyos vértices son elementos de la red se describe mediante el polinomio de Ehrhart del politopo. Las fórmulas para algunos de los coeficientes de este polinomio también incluyen d(Λ).
Problemas de celosía computacional
Los problemas de redes computacionales tienen muchas aplicaciones en informática. Por ejemplo, el algoritmo de reducción de base reticular (LLL) Lenstra-Lenstra-Lovász se ha utilizado en el criptoanálisis de muchos esquemas de cifrado de clave pública, y se sabe que muchos esquemas criptográficos basados en celosía son seguros bajo el supuesto de que ciertos problemas de celosía son computacionalmente difícil.
Retículas en dos dimensiones: discusión detallada
Hay cinco tipos de redes 2D según el teorema de restricción cristalográfica. A continuación, el grupo de papel tapiz de la red se proporciona en notación IUC, notación Orbifold y notación Coxeter, junto con un diagrama de papel tapiz que muestra los dominios de simetría. Tenga en cuenta que un patrón con este retículo de simetría traslacional no puede tener más, pero puede tener menos simetría que el propio retículo. Una lista completa de subgrupos está disponible. Por ejemplo, a continuación, la red hexagonal/triangular se muestra dos veces, con una simetría de reflexión completa de 6 pliegues y la mitad de 3 pliegues. Si el grupo de simetría de un patrón contiene una rotación de n veces, entonces la red tiene simetría de n veces para n pares y de 2 n veces para n impares.
| mmm, (2*22), [∞,2,∞] | p4m, (*442), [4,4] | p6m, (*632), [6,3] |
|---|---|---|
  retícula rómbicatambién centrada retícula rectangularisósceles triangular retícula rómbicatambién centrada retícula rectangularisósceles triangular |   celosía cuadradarecta isósceles triangular celosía cuadradarecta isósceles triangular | 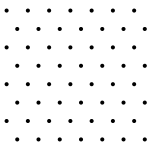  celosía hexagonal(retícula triangular equilátera) celosía hexagonal(retícula triangular equilátera) |
| pmm, *2222, [∞,2,∞] | p2, 2222, [∞,2,∞] | p3m1, (*333), [3 ] |
 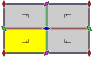 celosía rectangulartambién centrada celosía rómbicatriángulo rectángulo celosía rectangulartambién centrada celosía rómbicatriángulo rectángulo |   retícula paralelogrammicatambién retícula oblicuaescaleno triangular retícula paralelogrammicatambién retícula oblicuaescaleno triangular |  retícula triangular equilátera(retícula hexagonal) retícula triangular equilátera(retícula hexagonal) |
Para la clasificación de una red dada, comience con un punto y tome el segundo punto más cercano. Para el tercer punto, que no está en la misma línea, considere sus distancias a ambos puntos. Entre los puntos para los cuales la menor de estas dos distancias sea menor, elija un punto para el cual la mayor de las dos sea menor. (No es lógicamente equivalente, pero en el caso de celosías que dan el mismo resultado es simplemente "Elija un punto para el cual el mayor de los dos sea menor").
Los cinco casos corresponden a que el triángulo es equilátero, recto isósceles, recto, isósceles y escaleno. En una red rómbica, la distancia más corta puede ser una diagonal o un lado del rombo, es decir, el segmento de línea que conecta los dos primeros puntos puede ser o no uno de los lados iguales del triángulo isósceles. Esto depende de que el ángulo más pequeño del rombo sea menor de 60° o entre 60° y 90°.
El caso general se conoce como celosía de período. Si los vectores p y q generan la red, en lugar de p y q también podemos tomar p y p - q, etc. En general en 2D, podemos tomar a p + b q y c p + d q para los enteros a, b, c y d tales que ad-bc es 1 o -1. Esto asegura que p y qellos mismos son combinaciones lineales enteras de los otros dos vectores. Cada par p, q define un paralelogramo, todos con la misma área, la magnitud del producto vectorial. Un paralelogramo define completamente todo el objeto. Sin más simetría, este paralelogramo es un paralelogramo fundamental.
Los vectores p y q se pueden representar mediante números complejos. Hasta el tamaño y la orientación, un par se puede representar por su cociente. Expresado geométricamente: si dos puntos de la red son 0 y 1, consideramos la posición de un tercer punto de la red. La equivalencia en el sentido de generar la misma red está representada por el grupo modular: 

Retículas en tres dimensiones
Los 14 tipos de celosías en 3D se denominan celosías de Bravais. Se caracterizan por su grupo espacial. Los patrones 3D con simetría traslacional de un tipo particular no pueden tener más, pero pueden tener menos simetría que la propia red.
Retículas en espacio complejo
Una red 

Por ejemplo, los enteros gaussianos ![{displaystyle mathbb {Z} [i]=mathbb {Z} +imathbb {Z} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2749edc2f0a1147036f27d5dd0f5c7e365ac981)




En grupos de mentira
De manera más general, una red Γ en un grupo de Lie G es un subgrupo discreto, tal que el cociente G / Γ es de medida finita, ya que la medida en él heredada de la medida de Haar en G (invariante por la izquierda o invariante por la derecha, la definición es independiente de esa elección). Eso será ciertamente el caso cuando G /Γ sea compacto, pero esa condición suficiente no es necesaria, como lo muestra el caso del grupo modular en SL 2 (R), que es un retículo pero donde el cociente no es compacto (tiene cúspides). Hay resultados generales que indican la existencia de redes en grupos de Lie.
Se dice que una red es uniforme o cocompacta si G /Γ es compacta; de lo contrario, la red se llama no uniforme.
Retículas en espacios vectoriales generales
Si bien normalmente consideramos 
Sea K un campo, sea V un espacio vectorial K n -dimensional, sea una base K para V y sea R un anillo contenido dentro de K. Entonces la red R en V generada por B viene dada por:



En general, diferentes bases B generarán diferentes redes. Sin embargo, si la matriz de transición T entre las bases está en 


Casos importantes de tales retículas ocurren en la teoría de números con K un campo p -ádico y R los enteros p -ádicos.
Para un espacio vectorial que también es un espacio de producto interno, la red dual puede describirse concretamente mediante el conjunto

o equivalentemente como

Nociones relacionadas
- Un elemento primitivo de una red es un elemento que no es un múltiplo entero positivo de otro elemento de la red.
Contenido relacionado
Pi
Enrico Bombieri
Relación de aspecto