
Punto de fuga

Un punto de fuga es un punto en el plano de la imagen de una representación en perspectiva donde las proyecciones en perspectiva bidimensional de líneas mutuamente paralelas en un espacio tridimensional parecen converger. Cuando el conjunto de líneas paralelas es perpendicular al plano de una imagen, la construcción se conoce como perspectiva de un punto, y su punto de fuga corresponde al óculo, o "punto del ojo", desde el cual se debe ver la imagen. para una geometría de perspectiva correcta. Los dibujos lineales tradicionales utilizan objetos con uno a tres conjuntos de paralelos, definiendo de uno a tres puntos de fuga.
El arquitecto y erudito humanista italiano Leon Battista Alberti introdujo por primera vez el concepto en su tratado sobre la perspectiva en el arte, De pictura, escrito en 1435.
Notación vectorial

El punto de fuga también puede denominarse "punto de dirección", ya que las líneas que tienen el mismo vector direccional, digamos D, tendrán el mismo punto de fuga. Matemáticamente, sea q ≡ (x, y, f) ser un punto situado en el plano de la imagen, donde f es la distancia focal (de la cámara asociada con la imagen), y sea vq ≡ (< span class="num">x/h , y/h, f/h) sea el vector unitario asociado con q, donde h = √x2 + y2 + f2. Si consideramos una recta en el espacio S con el vector unitario ns ≡ (nx, ny, < i>nz) y su punto de fuga vs, el vector unitario asociado con vs es igual a ns, asumiendo que ambos apuntan hacia el plano de la imagen.
Cuando el plano de la imagen es paralelo a dos ejes de coordenadas mundiales, las líneas paralelas al eje cortado por este plano de la imagen tendrán imágenes que se encontrarán en un único punto de fuga. Las líneas paralelas a los otros dos ejes no formarán puntos de fuga ya que son paralelas al plano de la imagen. Ésta es una perspectiva de un solo punto. De manera similar, cuando el plano de la imagen cruza dos ejes de coordenadas mundiales, las líneas paralelas a esos planos se encontrarán formando dos puntos de fuga en el plano de la imagen. Esto se llama perspectiva de dos puntos. En perspectiva de tres puntos, el plano de la imagen intersecta x, y y z y, por lo tanto, las líneas paralelas a estos ejes se cruzan, lo que da como resultado tres desvanecimientos diferentes. puntos.
Teorema
El teorema del punto de fuga es el teorema principal de la ciencia de la perspectiva. Dice que la imagen en un plano de imagen π de una línea L en el espacio, no paralelo a la imagen, está determinado por su intersección con π y su punto de fuga. Algunos autores han utilizado la frase "la imagen de una línea incluye su punto de fuga". Guidobaldo del Monte hizo varias verificaciones y Humphry Ditton calificó el resultado como la "principal y gran propuesta". Brook Taylor escribió el primer libro en inglés sobre perspectiva en 1714, en el que introdujo el término "punto de fuga" y fue el primero en explicar completamente la geometría de la perspectiva multipunto, y la historiadora Kirsti Andersen recopiló estas observaciones. Señala que, en términos de geometría proyectiva, el punto de fuga es la imagen del punto en el infinito asociado con L, como la línea de visión desde O a través del punto de fuga es paralelo a L.
Línea de fuga
Así como un punto de fuga se origina en una línea, una línea de fuga se origina en un plano α que no es paralelo a la imagen π. Dado el punto ocular O y β el plano paralelo a α y acostado en O, luego el desapareciendo la línea de α es β ∩ π. Por ejemplo, cuando α es el plano de tierra y β es el plano del horizonte, entonces la línea de fuga de α es la línea del horizonte β ∩ π.
En pocas palabras, la línea de fuga de algún plano, digamos α, se obtiene mediante la intersección del plano de la imagen con otro plano, digamos β, paralelo al plano de interés (α), pasando por el centro de cámaras. Para diferentes conjuntos de líneas paralelas a este plano α, sus respectivos puntos de fuga estarán en esta línea de fuga. La línea del horizonte es una línea teórica que representa el nivel de los ojos del observador. Si el objeto está debajo de la línea del horizonte, sus líneas se inclinan hacia la línea del horizonte. Si el objeto está arriba, se inclinan hacia abajo.
Propiedades
1. Las proyecciones de dos conjuntos de líneas paralelas que se encuentran en algún plano πA parecen converger, es decir, el punto de fuga asociado con ese par, en una línea de horizonte o línea de fuga H formada por la intersección del plano de la imagen con el plano paralelo a πA y pasando por el orificio. Prueba: Considere el plano de tierra π, como y = c que es, por simplicidad, ortogonal al plano de la imagen. Además, considere una línea L que se encuentra en el plano π, que se define mediante la ecuación ax + bz = d. Usando proyecciones estenopeicas en perspectiva, un punto en L proyectado en el plano de la imagen tendrá coordenadas definidas como,
- x = f·x/z = f·d − bz/az
- y = f·Sí./z = f·c/z
Esta es la representación paramétrica de la imagen L′ de la línea L con z como parámetro. Cuando z → −∞ se detiene en el punto (x′,y′) = (−fb/a,0) en x′ del plano de la imagen. Este es el punto de fuga correspondiente a todas las rectas paralelas con pendiente −b/a en el plano π. Todos los puntos de fuga asociados con diferentes líneas con diferentes pendientes pertenecientes al plano π estarán en la x′ , que en este caso es la línea del horizonte.
2. Sean A, B y C ser tres rectas mutuamente ortogonales en el espacio y vA ≡ (xA, yA, f)< /span>, vB ≡ (xB, yB, f), vC ≡ (xC, yC, f) sean los tres puntos de fuga correspondientes respectivamente. Si conocemos las coordenadas de uno de estos puntos, digamos vA, y el dirección de una línea recta en el plano de la imagen, que pasa por un segundo punto, digamos vB< /span>, podemos calcular las coordenadas de vB y vC
3. Sean A, B y C ser tres rectas mutuamente ortogonales en el espacio y vA ≡ (xA, yA, f)< /span>, vB ≡ (xB, yB, f), vC ≡ (xC, yC, f) sean los tres puntos de fuga correspondientes respectivamente. El ortocentro del triángulo con vértices en los tres puntos de fuga es la intersección del eje óptico y el plano de la imagen.
Perspectiva curvilínea y inversa
Una perspectiva curvilínea es un dibujo con 4 o 5 puntos de fuga. En la perspectiva de 5 puntos, los puntos de fuga se asignan a un círculo con 4 puntos de fuga en los puntos cardinales N, W, S, E y uno en el origen del círculo.
Una perspectiva inversa es un dibujo con puntos de fuga que se colocan fuera de la pintura con la ilusión de que están "frente" la pintura.

Proyección de perspectiva de punto único.

Perspectiva de punto único en la fotografía
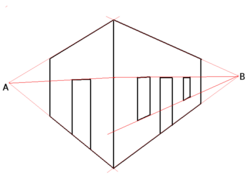
Proyección de perspectiva de doble punto.

El uso de la perspectiva de Pietro Perugino en Entrega de las llaves fresco en la Capilla Sixtina (1481–82) ayudó a traer el Renacimiento a Roma.



.jpg)
Detección
Varios métodos para la detección de puntos de fuga utilizan los segmentos de línea detectados en las imágenes. Otras técnicas implican considerar directamente los gradientes de intensidad de los píxeles de la imagen.
Hay una cantidad significativamente grande de puntos de fuga presentes en una imagen. Por tanto, el objetivo es detectar los puntos de fuga que corresponden a las direcciones principales de una escena. Esto generalmente se logra en dos pasos. El primer paso, llamado paso de acumulación, como su nombre indica, agrupa los segmentos de línea con el supuesto de que un grupo tendrá un punto de fuga común. El siguiente paso encuentra los principales clusters presentes en la escena y por eso se llama paso de búsqueda.
En el paso de acumulación, la imagen se asigna a un espacio delimitado llamado espacio acumulador. El espacio del acumulador se divide en unidades llamadas celdas. Barnard asumió que este espacio era una esfera gaussiana centrada en el centro óptico de la cámara como un espacio acumulador. Un segmento de línea en la imagen corresponde a un círculo máximo en esta esfera, y el punto de fuga en la imagen se asigna a un punto. La esfera gaussiana tiene celdas acumuladoras que aumentan cuando un círculo máximo las atraviesa, es decir, en la imagen un segmento de línea cruza el punto de fuga. Desde entonces se han realizado varias modificaciones, pero una de las técnicas más eficientes fue utilizar la Transformada de Hough, asignando los parámetros del segmento de línea al espacio acotado. Se han aplicado transformaciones de Hough en cascada para múltiples puntos de fuga.
El proceso de mapeo de la imagen a los espacios delimitados provoca la pérdida de las distancias reales entre segmentos de línea y puntos.
En el paso de búsqueda, se encuentra la celda del acumulador con el número máximo de segmentos de línea que la atraviesan. A esto le sigue la eliminación de esos segmentos de línea y el paso de búsqueda se repite hasta que este recuento desciende por debajo de un determinado umbral. A medida que se dispone de más potencia de cálculo, se pueden encontrar puntos correspondientes a dos o tres direcciones mutuamente ortogonales.
Aplicaciones

- En (1), la anchura de la calle lateral, W se computa de los anchos conocidos de las tiendas adyacentes.
- En (2), el ancho de una sola tienda es necesario porque un punto de fuga, V es visible.
- Calibración de la cámara: Los puntos de desaparición de una imagen contienen información importante para la calibración de la cámara. Se han introducido diversas técnicas de calibración utilizando las propiedades de puntos desaparecidos para encontrar parámetros de calibración intrínseca y extrínseca.
- Reconstrucción 3D: Un ambiente hecho por el hombre tiene dos características principales: varias líneas en la escena son paralelas, y una serie de bordes presentes son ortogonales. Los puntos de fuga ayudan a comprender el medio ambiente. Usando conjuntos de líneas paralelas en el plano, la orientación del plano se puede calcular utilizando puntos de desaparecimiento. Torre y Coelho realizaron extensas investigaciones sobre el uso de puntos de fuga para implementar un sistema completo. Con la suposición de que el medio ambiente consiste en objetos con sólo lados paralelos o perpendiculares, también llamados Lego-land, utilizando puntos de desaparecimiento construidos en una sola imagen de la escena recuperaron la geometría 3D de la escena. También se utilizan ideas similares en el campo de la robótica, principalmente en la navegación y los vehículos autónomos, y en áreas relacionadas con la detección de objetos.