
Proyección 3D

Una proyección 3D (o proyección gráfica) es una técnica de diseño utilizada para mostrar un objeto tridimensional (3D) en una superficie bidimensional (2D). Estas proyecciones se basan en la perspectiva visual y el análisis de aspectos para proyectar un objeto complejo con capacidad de visualización en un plano más simple.
Las proyecciones 3D utilizan las cualidades primarias de la forma básica de un objeto para crear un mapa de puntos, que luego se conectan entre sí para crear un elemento visual. El resultado es un gráfico que contiene propiedades conceptuales para interpretar la figura o la imagen como no realmente plana (2D), sino como un objeto sólido (3D) que se ve en una pantalla 2D.
Los objetos 3D se muestran en gran medida en medios bidimensionales (como papel y monitores de computadora). Como tal, las proyecciones gráficas son un elemento de diseño de uso común; en particular, en dibujo de ingeniería, dibujo y gráficos por computadora. Las proyecciones se pueden calcular mediante el empleo de análisis y fórmulas matemáticas, o mediante el uso de diversas técnicas geométricas y ópticas.
Resumen


La proyección se logra mediante el uso de "proyectores" imaginarios; la imagen mental proyectada se convierte en la visión del técnico de la imagen final deseada. Los métodos proporcionan un procedimiento de imagen uniforme entre personas capacitadas en gráficos técnicos (dibujo mecánico, diseño asistido por computadora, etc.). Siguiendo un método, el técnico puede producir la imagen prevista en una superficie plana como papel de dibujo.
Hay dos categorías de proyección gráfica, cada una con su propio método:
- proyección paralela
- proyección de perspectiva
Proyección multivista (elevación)

Proyección yosométrica

Proyección militar
Proyecto de gabinete
Perspectiva de un punto

Perspectiva de dos puntos
Perspectiva de tres puntos






Proyección paralela

En la proyección paralela, las líneas de visión desde el objeto hasta el plano de proyección son paralelas entre sí. Así, las líneas que son paralelas en el espacio tridimensional permanecen paralelas en la imagen proyectada bidimensional. La proyección paralela también corresponde a una proyección en perspectiva con una distancia focal infinita (la distancia desde la lente de una cámara y el punto focal), o 'zoom'.
Las imágenes dibujadas en proyección paralela se basan en la técnica de la axonometría ("para medir a lo largo de los ejes"), como se describe en el teorema de Pohlke. En general, la imagen resultante es oblicua (los rayos no son perpendiculares al plano de la imagen); pero en casos especiales el resultado es ortográfico (los rayos son perpendiculares al plano de la imagen). La axonometría no debe confundirse con la proyección axonométrica, ya que en la literatura inglesa esta última generalmente se refiere solo a una clase específica de imágenes (ver más abajo).
Proyección ortográfica
La proyección ortográfica se deriva de los principios de la geometría descriptiva y es una representación bidimensional de un objeto tridimensional. Es una proyección paralela (las líneas de proyección son paralelas tanto en la realidad como en el plano de proyección). Es el tipo de proyección de elección para los dibujos de trabajo.
Si la normalidad del plano de visualización (la dirección de la cámara) es paralela a uno de los ejes primarios (que es el x, Sí., o z axis), la transformación matemática es como sigue; Para proyectar el punto 3D ax{displaystyle a_{x}, aSí.{displaystyle A_{y}, az{displaystyle a_{z} sobre el punto 2D bx{displaystyle b_{x}, bSí.{displaystyle B_{y} usando una proyección ortoográfica paralela al eje y (donde positivo Sí. representa la dirección hacia adelante - vista del perfil), las siguientes ecuaciones se pueden utilizar:





- bx=sxax+cx{displaystyle B_{x}=s_{x}a_{x}+c_{x}
- bSí.=szaz+cz{displaystyle ¿Qué?


donde el vector s es un factor de escala arbitrario y c es un desplazamiento arbitrario. Estas constantes son opcionales y se pueden usar para alinear correctamente la ventana gráfica. Usando la multiplicación de matrices, las ecuaciones se convierten en:
- [bxbSí.]=[sx0000sz][axaSí.az]+[cxcz].{fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif}} {begin {bmatrix}s_{x} {x} {x} {x}{x} {x} {x} {x} {b} {x}}} {x}{x} {x}{x} {b}b}b}b}b}b}begin}begin}begin}b}begin}b}b}b}b}b}b}b}b}b}b}begin}b}b}begin}begin {begin {begin {b}b}b}b}b}b}begin {begin}betrix}{b}b}b}b}begin} {b}b}b}b}b}b}

Si bien las imágenes proyectadas ortográficamente representan la naturaleza tridimensional del objeto proyectado, no representan el objeto tal como sería registrado fotográficamente o percibido por un espectador que lo observa directamente. En particular, las longitudes paralelas en todos los puntos de una imagen proyectada ortográficamente tienen la misma escala independientemente de si están lejos o cerca del espectador virtual. Como resultado, las longitudes no se acortan como lo harían en una proyección en perspectiva.
Proyección multivista

Con las proyecciones multivista, se producen hasta seis imágenes (llamadas vistas primarias) de un objeto, con cada plano de proyección paralelo a uno de los ejes de coordenadas del objeto.. Las vistas se posicionan entre sí de acuerdo con cualquiera de dos esquemas: proyección de primer ángulo o tercer ángulo. En cada uno, las apariencias de las vistas se pueden considerar como proyectadas en planos que forman una caja de 6 lados alrededor del objeto. Aunque se pueden dibujar seis lados diferentes, generalmente tres vistas de un dibujo brindan suficiente información para hacer un objeto 3D. Estas vistas se conocen como vista frontal, vista superior y vista final. También se utilizan los términos alzado, planta y sección.
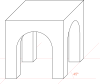
Proyección oblicua


En las proyecciones oblicuas, los rayos de proyección paralelos no son perpendiculares al plano de visualización como en la proyección ortográfica, sino que inciden en el plano de proyección en un ángulo distinto de los noventa grados. Tanto en la proyección ortográfica como en la oblicua, las líneas paralelas en el espacio aparecen paralelas en la imagen proyectada. Debido a su simplicidad, la proyección oblicua se utiliza exclusivamente con fines pictóricos y no para dibujos formales de trabajo. En un dibujo pictórico oblicuo, los ángulos mostrados entre los ejes así como los factores de escorzo (escala) son arbitrarios. La distorsión creada de este modo normalmente se atenúa alineando un plano del objeto de la imagen para que sea paralelo al plano de proyección, creando así una imagen de tamaño completo de forma real del plano elegido. Los tipos especiales de proyecciones oblicuas son:
Proyección caballero (45°)
En proyección caballera (a veces perspectiva caballeresca o punto de vista alto) un punto del objeto se representa mediante tres coordenadas, x, y y z. En el dibujo, está representado por solo dos coordenadas, x″ e y″. En el dibujo plano, dos ejes, x y z en la figura, son perpendiculares y la longitud en estos ejes se dibuja con una escala de 1:1; es por tanto similar a las proyecciones dimétricas, aunque no es una proyección axonométrica, ya que el tercer eje, aquí y, está dibujado en diagonal, formando un ángulo arbitrario con la x″ eje, generalmente 30 o 45°. La longitud del tercer eje no está escalada.
Proyección de gabinete
El término proyección de gabinete (a veces perspectiva de gabinete) proviene de su uso en ilustraciones de la industria del mueble. Al igual que la perspectiva caballerosa, una cara del objeto proyectado es paralela al plano de visualización y el tercer eje se proyecta formando un ángulo (normalmente 30° o 45° o arctan(2) = 63,4°). A diferencia de la proyección cavalier, donde el tercer eje mantiene su longitud, con la proyección de gabinete, la longitud de las líneas de retroceso se corta a la mitad.
Proyección militar
Una variante de la proyección oblicua se denomina proyección militar. En este caso, las secciones horizontales se dibujan isométricamente para que los planos de planta no se distorsionen y las verticales se dibujen en ángulo. La proyección militar viene dada por la rotación en el plano xy y una traslación vertical de una cantidad z.
Proyección axonométrica

Las proyecciones axonométricas muestran una imagen de un objeto visto desde una dirección oblicua para revelar las tres direcciones (ejes) del espacio en una sola imagen. Las proyecciones axonométricas pueden ser ortográficas u oblicuas. Los dibujos de instrumentos axonométricos se utilizan a menudo para aproximar las proyecciones de perspectiva gráfica, pero existe una distorsión concomitante en la aproximación. Debido a que las proyecciones pictóricas contienen de forma innata esta distorsión, en los dibujos de instrumentos pictóricos se pueden tomar grandes libertades para la economía de esfuerzo y el mejor efecto.
La proyección axonométrica se subdivide en tres categorías: proyección isométrica, proyección dimétrica y proyección trimétrica. dependiendo del ángulo exacto en el que la vista se desvía de la ortogonal. Una característica típica de las ilustraciones ortográficas es que un eje del espacio generalmente se muestra como vertical.
Proyección isométrica
En imágenes isométricas (para conocer los métodos, consulte Proyección isométrica), la dirección de la vista es tal que los tres ejes del espacio aparecen igualmente acortados y hay un ángulo común de 120° entre ellos. La distorsión provocada por el escorzo es uniforme, por lo que se conserva la proporcionalidad de todos los lados y longitudes, y los ejes comparten una escala común. Esto permite leer o tomar medidas directamente del dibujo.
Proyección dimétrica
En imágenes dimétricas (para conocer los métodos, consulte Proyección dimétrica), la dirección de la vista es tal que dos de los tres ejes del espacio aparecen igualmente en escorzo, de los cuales la escala correspondiente y los ángulos de presentación son determinado según el ángulo de visión; la escala de la tercera dirección (vertical) se determina por separado. Las aproximaciones son comunes en dibujos dimétricos.
Proyección trimétrica
En imágenes trimétricas (para conocer los métodos, consulte Proyección trimétrica), la dirección de visualización es tal que los tres ejes del espacio aparecen desigualmente escorzados. La escala a lo largo de cada uno de los tres ejes y los ángulos entre ellos se determinan por separado según lo dicte el ángulo de visión. Las aproximaciones en dibujos trimétricos son comunes.
Limitaciones de la proyección paralela


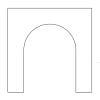
Los objetos dibujados con proyección paralela no parecen más grandes o más pequeños a medida que se acercan o se alejan del espectador. Si bien es ventajoso para los dibujos arquitectónicos, donde las medidas deben tomarse directamente de la imagen, el resultado es una distorsión percibida, ya que, a diferencia de la proyección en perspectiva, no es así como funcionan normalmente nuestros ojos o la fotografía. También puede resultar fácilmente en situaciones en las que la profundidad y la altitud son difíciles de medir, como se muestra en la ilustración de la derecha.
En este dibujo isométrico, la esfera azul es dos unidades más alta que la roja. Sin embargo, esta diferencia en la elevación no es evidente si uno cubre la mitad derecha de la imagen, ya que los cuadros (que sirven como pistas que sugieren la altura) quedan oscurecidos.
Esta ambigüedad visual se ha explotado en el arte óptico, así como en el "objeto imposible" dibujos. Waterfall (1961) de M. C. Escher, aunque no utiliza estrictamente una proyección paralela, es un ejemplo bien conocido, en el que un canal de agua parece viajar sin ayuda a lo largo de un camino descendente, solo para luego paradójicamente vuelve a caer al volver a su origen. El agua parece así desobedecer la ley de conservación de la energía. Un ejemplo extremo se representa en la película Origen, donde mediante un truco de perspectiva forzada, una escalera inmóvil cambia su conectividad. El videojuego Fez utiliza trucos de perspectiva para determinar dónde puede y no puede moverse un jugador en forma de rompecabezas.
Proyección en perspectiva


La proyección de perspectiva o la transformación de perspectiva es una proyección no lineal donde los objetos tridimensionales se proyectan en un plano de imagen. Esto tiene el efecto de que los objetos distantes parecen más pequeños que los objetos más cercanos.
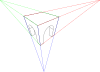
También significa que las líneas que son paralelas por naturaleza (es decir, se encuentran en el punto infinito) parecen intersecarse en la imagen proyectada. Por ejemplo, si los ferrocarriles se representan con proyección en perspectiva, parecen converger hacia un solo punto, llamado punto de fuga. Los lentes fotográficos y el ojo humano funcionan de la misma manera, por lo que la proyección en perspectiva parece más realista. La proyección en perspectiva generalmente se clasifica en perspectiva de un punto, dos puntos y tres puntos, dependiendo de la orientación del plano de proyección hacia el ejes del objeto representado.
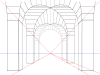
Los métodos de proyección gráfica se basan en la dualidad entre líneas y puntos, donde dos líneas rectas determinan un punto mientras que dos puntos determinan una línea recta. La proyección ortogonal del punto del ojo sobre el plano del cuadro se denomina punto principal de fuga (P.P. en el esquema de la derecha, del término italiano punto principale, acuñado durante la Renacimiento).
Dos puntos relevantes de una recta son:
- su intersección con el plano de la imagen, y
- su punto de fuga, encontrado en la intersección entre la línea paralela desde el punto de vista y el plano de imagen.
El punto de fuga principal es el punto de fuga de todas las líneas horizontales perpendiculares al plano de la imagen. Los puntos de fuga de todas las líneas horizontales se encuentran en la línea del horizonte. Si, como suele ser el caso, el plano de la imagen es vertical, todas las líneas verticales se dibujan verticalmente y no tienen un punto de fuga finito en el plano de la imagen. Se pueden prever fácilmente varios métodos gráficos para proyectar escenas geométricas. Por ejemplo, las líneas trazadas desde el punto del ojo a 45° hasta el plano del cuadro se cruzan con este último a lo largo de un círculo cuyo radio es la distancia del punto del ojo al plano, por lo que trazar ese círculo ayuda a construir todos los puntos de fuga de 45°. líneas; en particular, la intersección de ese círculo con la línea del horizonte consta de dos puntos de distancia. Son útiles para dibujar pisos de tablero de ajedrez que, a su vez, sirven para ubicar la base de los objetos en la escena. En la perspectiva de un sólido geométrico de la derecha, tras elegir el punto de fuga principal —que determina la línea del horizonte—, el punto de fuga a 45° del lado izquierdo del dibujo completa la caracterización del punto de vista (igualmente distante). Se dibujan dos líneas desde la proyección ortogonal de cada vértice, una a 45° y otra a 90° del plano del cuadro. Después de cruzar la línea de tierra, esas líneas van hacia el punto de distancia (para 45°) o el punto principal (para 90°). Su nueva intersección ubica la proyección del mapa. Las alturas naturales se miden por encima de la línea del suelo y luego se proyectan de la misma manera hasta que se encuentran con la vertical del mapa.
Mientras que la proyección ortográfica ignora la perspectiva para permitir mediciones precisas, la proyección en perspectiva muestra los objetos distantes como más pequeños para proporcionar realismo adicional.
Fórmula matemática
La proyección en perspectiva requiere una definición más complicada en comparación con las proyecciones ortográficas. Una ayuda conceptual para comprender la mecánica de esta proyección es imaginar la proyección 2D como si los objetos se estuvieran viendo a través del visor de una cámara. La posición, la orientación y el campo de visión de la cámara controlan el comportamiento de la transformación de proyección. Las siguientes variables se definen para describir esta transformación:
- ax,Sí.,z{displaystyle mathbf {a} _{x,y,z} – la posición 3D de un punto A que se proyectará.
- cx,Sí.,z{displaystyle mathbf {c} _{x,y,z} – la posición 3D de un punto C representando a la cámara.
- Silencio Silencio x,Sí.,z{displaystyle mathbf {theta } _{x,y,z} – La orientación de la cámara (representada por los ángulos Tait–Bryan).
- ex,Sí.,z{displaystyle mathbf {e} _{x,y,z} – la posición de la superficie de visualización relativa al agujero de la cámara C.




La mayoría de las convenciones usan valores z positivos (el plano está frente al agujero de alfiler), sin embargo, los valores z negativos son físicamente más correctos, pero la imagen se invertirá tanto horizontal como verticalmente. Lo que resulta en:
- bx,Sí.{displaystyle mathbf {b} _{x,y} – la proyección 2D a.{displaystyle mathbf {a}


Cuando cx,Sí.,z=.. 0,0,0.. ,{displaystyle mathbf {c} - Sí. y Silencio Silencio x,Sí.,z=.. 0,0,0.. ,{displaystyle mathbf {theta } _{x,y,z}=langle 0,0,0rangle} el vector 3D .. 1,2,0.. {displaystyle langle 1,2,0rangle } se proyecta al vector 2D .. 1,2.. {displaystyle langle 1,2rangle }.




De lo contrario, para calcular bx,Sí.{displaystyle mathbf {b} _{x,y} primero definimos un vector dx,Sí.,z{displaystyle mathbf {d} _{x,y,z} como la posición del punto A con respecto a un sistema de coordenadas definido por la cámara, con origen en C y rotado por Silencio Silencio {displaystyle mathbf {theta} con respecto al sistema de coordenadas inicial. Esto se logra restando c{displaystyle mathbf {c} desde a{displaystyle mathbf {a} y luego aplicar una rotación − − Silencio Silencio {displaystyle -mathbf {theta} al resultado. Esta transformación se llama a menudo cámara transformado, y se puede expresar de la siguiente manera, expresando la rotación en términos de rotaciones acerca de los x, Sí, y z ejes (estos cálculos suponen que los ejes se ordenan como un sistema zurdo de ejes):





- [dxdSí.dz]=[1000# ()Silencio Silencio x)pecado ()Silencio Silencio x)0− − pecado ()Silencio Silencio x)# ()Silencio Silencio x)][# ()Silencio Silencio Sí.)0− − pecado ()Silencio Silencio Sí.)010pecado ()Silencio Silencio Sí.)0# ()Silencio Silencio Sí.)][# ()Silencio Silencio z)pecado ()Silencio Silencio z)0− − pecado ()Silencio Silencio z)# ()Silencio Silencio z)0001]()[axaSí.az]− − [cxcSí.cz]){fnMicrosoft}\\fnK}\\\\\fnMicrosoft {}\\fn}\\\\\fnK}\\\\\\\\\\\\fnMicrosoft} {fnMicrosoft Sans Serif} {fnMicrosoft} {fnMicrosoft Sans Serif} {begin {begin{bmatrix}1 limit0}}} {fnMitb} {cH0}}}}}}}}}} {}}}}}} {} {Thet0} {cH0} {cH0} {cH0}}cH0}cH0}cH0}}cH0}cH0}cH0} {cH0}}cH0}}cH00cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH {begin{bmatrix}cos(mathbf {theta })\\\Theta } {y})} {begin{y}begin{bmatrix}cos(Theta }) âTMa {}}\0]\ta\\pe0ta\pe0ta\\\\\\s])}\\\s009s00s00s009s00s00s00}s]s0}s00es}es}s00s00ess00es}s004es}s00s00}s004s00s004s004es}es}es}es}es}es}s00es}s004s00s00s004s00es}es {begin{bmatrix}cos(mathbf {theta } _{z})} {begin{bmatrix}cos(mathbf {theta) {f}fn}fnfncH00}cH0}cH0}cH0}cH0}ccH0}cH0}cH0}cH0}cH00}cH00}cH00}cH00}cH00}cH00}cH0cH00}cH0}cH0}cH0}cH00}cH00}cH00}cH00}cH00}cH00}cH00}cH0}c}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH0}cH00}cH00}cH00}cH0}cH00}cH00}cH00}cH0}cH0}cH00}c}cH ¿Por qué? {c} _{x}\\\\\\\fnMicrosoft {c} ¿Por qué?

Esta representación corresponde a girar por tres ángulos Euler (más correctamente, ángulos Tait–Bryan), utilizando los xyz convención, que se puede interpretar como "rota sobre el extrínseco ejes (ejes de los escena) en el orden z, Sí., x (reading right-to-left) intrínseco ejes (ejes de los cámara) en el orden x, y, z (Leer izquierda a derecha)". Si la cámara no está rota (Silencio Silencio x,Sí.,z=.. 0,0,0.. {displaystyle mathbf {theta } _{x,y,z}=langle 0,0,0rangle }), entonces las matrices abandonan (como identidades), y esto reduce a simplemente un cambio: d=a− − c.{displaystyle mathbf {d} # Mathbf {a} - Mathbf {c}.


Alternativamente, sin usar matrices (sustituimos ax− − cx{displaystyle a_{x}-c_{x} con x{displaystyle mathbf {x} y así sucesivamente, y abreviar # ()Silencio Silencio α α ){displaystyle cos left(theta _{alpha }right)} a cα α {displaystyle c_{alpha } y pecado ()Silencio Silencio α α ){displaystyle sin left(theta _{alpha }right)} a sα α {displaystyle s_{alpha }):






- dx=cSí.()szSí.+czx)− − sSí.zdSí.=sx()cSí.z+sSí.()szSí.+czx))+cx()czSí.− − szx)dz=cx()cSí.z+sSí.()szSí.+czx))− − sx()czSí.− − szx){displaystyle {begin{aligned}mathbf {d} ¿Por qué? ¿Qué? - ¿Qué? ¿Qué? ##s_{y}(s_{z}mathbf {y} +c_{z}mathbf {x})-s_{x}(c_{z}mathbf {y} -s_{z}mathbf {x}end{aligned}}}}}}}}}}}

Este punto transformado se puede proyectar en el plano 2D usando la fórmula (aquí, x/y se usa como plano de proyección; la literatura también puede usar x/z):
- bx=ezdzdx+ex,bSí.=ezdzdSí.+eSí..{displaystyle {begin{aligned}mathbf {b}{x} {frac {fnMitbf {e} ¿Qué? Mathbf... {fnMicrosoft Sans Serif} ¿Qué? ¿Qué? ¿Qué?
![{displaystyle {begin{aligned}mathbf {b} _{x}&={frac {mathbf {e} _{z}}{mathbf {d} _{z}}}mathbf {d} _{x}+mathbf {e} _{x},\[5pt]mathbf {b} _{y}&={frac {mathbf {e} _{z}}{mathbf {d} _{z}}}mathbf {d} _{y}+mathbf {e} _{y}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f002d3d4ed5e51f66a9e80bad596258adb82ed25)
O, en forma matricial usando coordenadas homogéneas, el sistema
- [fxfSí.fw]=[10exez01eSí.ez001ez][dxdSí.dz]{fnMicrosoft}\\\fnK}\\\\fnMicrosoft {f}\\f}\\\\fnK}\\fnK}\\\\\\\fnMicrosoft}}}f}}}\\\f}}\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fnMinHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHH3}}}}}}}}}}}}}}}}}}}}}}}}}}}} ¿Qué? ################################################################################################################################################################################################################################################################ {fnMitbf} {fnK}\fnK}}} {fnMitbf {fnK} {fnK} {f}fn}} {fn} {f} {fn}}} {f}}f}}f} {fn}} {begin {bmatrix}m}mfn}m} {\f}f}\\cHFF}f}\fn}}\\f}\f}}\\fn}\f}f}f}f}f}\f}}\\fn}}\\fn}fn}fn}}}}}\\\\fn}}}\\\\fn}}}}}\\\\\\fn}fn}}}}}}}}\\\fn}cH00}cH0}}}}}}}}}}}}}} ¿Qué?

junto con un argumento que usa triángulos similares, conduce a la división por la coordenada homogénea, dando
- bx=fx/fwbSí.=fSí./fw{displaystyle {begin{aligned}mathbf {b}=mathbf {f} _{x}/mathbf {f} ¿Qué? ¿Qué? ¿Qué? ¿Qué?

La distancia del espectador desde la superficie de visualización, ez{displaystyle mathbf {e} _{z}, directamente relacionado con el campo de vista, donde α α =2⋅ ⋅ arctan ()1/ez){displaystyle alpha =2cdot arctan(1/mathbf {e} _{z})} es el ángulo visto. (Nota: Esto supone que usted mapea los puntos (-1,-1) y (1,1) a los rincones de su superficie de visualización)


Las ecuaciones anteriores también se pueden reescribir como:
- bx=()dxsx)/()dzrx)rz,bSí.=()dSí.sSí.)/()dzrSí.)rz.{fnMicrosoft Sans Serif} {f} {f} {f} {f} {f} {f} {f} {f} {f}f}f}f}f}f} {f}f} {f}f}f}f}cH00}f}f}f}f}f}f}f}f}f}f}cH00f}f}f}f}f}f}cH00cH00f}f}cH00f}f}f}f}f}f}f}cH00}f}f}f}cH00}cH00cH00cH00cH00}cH00cH00}cH00}cH00}cH00cH00cH00cH00}cH00} Mathbf {r}

En qué sx,Sí.{displaystyle mathbf {s} _{x,y} es el tamaño de la pantalla, rx,Sí.{displaystyle mathbf {r} _{x,y} es el tamaño de la superficie de grabación (CCD o film fotográfico), rz{displaystyle mathbf {r} _{z} es la distancia de la superficie de grabación a la pupila de entrada (centro de la cámara), y dz{displaystyle mathbf {d} _{z} es la distancia, desde el punto 3D que se proyecta, al alumno de entrada.




Pueden ser necesarias operaciones posteriores de recorte y escalado para mapear el plano 2D en cualquier medio de visualización en particular.
Proyección de perspectiva débil
Una proyección de perspectiva "mojada" utiliza los mismos principios de una proyección ortográfico, pero requiere que se especifique el factor de escalado, asegurando así que los objetos más cercanos aparecen más grandes en la proyección y viceversa. Se puede ver como un híbrido entre una proyección ortográfica y una perspectiva, y se describe como una proyección de perspectiva con profundidades de puntos individuales Zi{displaystyle Z_{i} reemplazado por una profundidad media constante Zave{displaystyle Z_{text{ave}}, o simplemente como una proyección ortográfica más un escalado.


El modelo débil-perspectivo se aproxima así a la proyección de la perspectiva utilizando un modelo más simple, similar a la perspectiva ortográfica pura (no escalada). Es una aproximación razonable cuando la profundidad del objeto a lo largo de la línea de visión es pequeña en comparación con la distancia de la cámara, y el campo de vista es pequeño. Con estas condiciones, se puede suponer que todos los puntos en un objeto 3D están a la misma distancia Zave{displaystyle Z_{text{ave}} desde la cámara sin errores significativos en la proyección (en comparación con el modelo de perspectiva completa).
Ecuación
- Px=XZavePSí.=YZave{displaystyle {begin{aligned} {X}{Z_{text{ave}}\[5pt] {Y} {Z_{text{ave}}}end{aligned}} {f}} {f}}} {f}} {f}}} {f}}} {f}}}} {f}}} {f}}}}}} {f} {f}}} {f}}}}}}}}}}}}}}}}}}}}}}}} {f}}}}} {f} {f}}}}}}}}}} {f}}}}}} {f}}}}}}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}
![{displaystyle {begin{aligned}&P_{x}={frac {X}{Z_{text{ave}}}}\[5pt]&P_{y}={frac {Y}{Z_{text{ave}}}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0d66248cfb79bcde6f7e7d136e18c3a7498b4ddd)
suponiendo la duración de la actividad f=1f=1.

Diagrama
![]()
Para determinar qué pantalla x-coordinado corresponde a un punto en Ax,Az{displaystyle A_{x},A_{z} multiplicar las coordenadas de punto por:

- Bx=AxBzAz{displaystyle B_{x}=A_{x}{frac {B_{z}{A_{z}}

dónde
- Bx{displaystyle B_{x} es la pantalla x coordenadas
- Ax{displaystyle A_{x} es el modelo x coordenadas
- Bz{displaystyle B_{z} es la longitud focal - la distancia axial del centro de la cámara al plano de la imagen
- Az{displaystyle A_{z} es la distancia de sujeto.




Debido a que la cámara está en 3D, lo mismo funciona para la coordenada y de la pantalla, sustituyendo y por x en el diagrama anterior y ecuación.
Did you mean:Alternatively, one could use clipping techniques, replacing the variables with values of the point that 's are out of the FOV-angle and the point inside Camera Matrix.
Esta técnica, también conocida como "Cámara inversa", es un cálculo de proyección en perspectiva con valores conocidos para calcular el último punto en el ángulo visible, proyectando desde el punto invisible, una vez finalizadas todas las transformaciones necesarias.
Contenido relacionado
Thomas Selfridge
Rover de exploración de Marte
Bazuca