
Programa vikingo
El programa Viking consistía en un par de sondas espaciales americanas idénticas, Viking 1 y Viking 2, que aterrizó en Marte en 1976. Cada nave espacial se componía de dos partes principales: un orbitador diseñado para fotografiar la superficie de Marte desde la órbita y un módulo de aterrizaje diseñado para estudiar el planeta desde la superficie. Los orbitadores también sirvieron como relés de comunicación para los módulos de aterrizaje una vez que aterrizaron.
El programa Viking se desarrolló a partir del anterior programa Voyager Mars de la NASA, aún más ambicioso, que no estaba relacionado con las exitosas sondas de espacio profundo Voyager de finales de la década de 1970. Viking 1 se lanzó el 20 de agosto de 1975, y la segunda nave, Viking 2, se lanzó el 9 de septiembre de 1975, ambas montadas sobre cohetes Titan IIIE con etapas superiores Centaur.. Viking 1 entró en la órbita de Marte el 19 de junio de 1976, seguido de Viking 2 el 7 de agosto.
Después de orbitar Marte durante más de un mes y devolver imágenes utilizadas para la selección del lugar de aterrizaje, los orbitadores y los módulos de aterrizaje se separaron; Luego, los módulos de aterrizaje entraron en la atmósfera marciana y aterrizaron suavemente en los sitios que habían sido elegidos. El módulo de aterrizaje Viking 1 aterrizó en la superficie de Marte el 20 de julio de 1976, más de dos semanas antes de que Viking 2'la llegada a la órbita. El Viking 2 luego aterrizó con éxito el 3 de septiembre. Los orbitadores continuaron tomando imágenes y realizando otras operaciones científicas desde la órbita mientras los módulos de aterrizaje desplegaban instrumentos en la superficie.
El costo del proyecto era de aproximadamente mil millones de dólares en el momento del lanzamiento, lo que equivale a unos cinco mil millones de dólares en 2021. La misión se consideró exitosa y se le atribuye haber ayudado a formar la mayor parte del conocimiento sobre Marte hasta finales de la década de 1990 y principios de la de 2000.
Objetivos científicos
- Obtener imágenes de alta resolución de la superficie marciana
- Caracterizar la estructura y composición de la atmósfera y la superficie
- Búsqueda de evidencia de vida en Marte
Orbitadores vikingos
Los objetivos principales de los dos orbitadores Viking eran transportar los módulos de aterrizaje a Marte, realizar tareas de reconocimiento para ubicar y certificar los lugares de aterrizaje, actuar como transmisores de comunicaciones para los módulos de aterrizaje y realizar sus propias investigaciones científicas. Cada orbitador, basado en la anterior nave espacial Mariner 9, era un octágono de aproximadamente 2,5 m de ancho. El par orbitador-módulo completamente alimentado tenía una masa de 3527 kg. Después de la separación y el aterrizaje, el módulo de aterrizaje tenía una masa de aproximadamente 600 kg y el orbitador 900 kg. La masa total del lanzamiento fue 2328 kg, de los cuales 1445 kg eran gases propulsores y de control de actitud. Las ocho caras de la estructura en forma de anillo tenían 0,4572 m de altura y alternativamente 1,397 y 0,508 m de ancho. La altura total era de 3,29 m desde los puntos de fijación del módulo de aterrizaje en la parte inferior hasta los puntos de fijación del vehículo de lanzamiento en la parte superior. Había 16 compartimentos modulares, 3 en cada una de las 4 caras largas y uno en cada cara corta. Cuatro alas de paneles solares se extendían desde el eje del orbitador, la distancia de punta a punta de dos paneles solares extendidos de manera opuesta era de 9,75 m.
Propulsión
La unidad de propulsión principal se montó sobre el autobús orbital. La propulsión fue proporcionada por un motor de cohete de combustible líquido bipropelente (monometilhidrazina y tetróxido de nitrógeno) que podía girar hasta 9 grados. El motor tenía una capacidad de empuje de 1323 N (297 lbf), proporcionando un cambio de velocidad de 1480 m/s. El control de actitud se logró mediante 12 pequeños chorros de nitrógeno comprimido.
Navegación y comunicación
Un sensor solar de adquisición, un sensor solar de crucero, un rastreador de estrellas Canopus y una unidad de referencia inercial que consta de seis giroscopios permitieron la estabilización de tres ejes. También había dos acelerómetros a bordo. Las comunicaciones se realizaron a través de un transmisor de banda S de 20 W (2,3 GHz) y dos TWTA de 20 W. También se agregó un enlace descendente (8,4 GHz) de banda X específicamente para la ciencia de la radio y para realizar experimentos de comunicaciones. El enlace ascendente se realizó a través de la banda S (2,1 GHz). Se colocó una antena parabólica orientable de dos ejes con un diámetro de aproximadamente 1,5 m en un borde de la base del orbitador, y una antena fija Antena de baja ganancia extendida desde la parte superior del bus. Dos grabadoras eran capaces de almacenar 1280 megabits cada una. También estaba disponible una radio repetidora de 381 MHz.
Poder
La energía para las dos naves orbitales fue proporcionada por ocho paneles solares de 1,57 × 1,23 m, dos en cada ala. Los paneles solares comprendían un total de 34.800 células solares y producían 620 W de potencia en Marte. La energía también se almacenó en dos baterías de níquel-cadmio de 30 A·h.
El área combinada de los cuatro paneles era de 15 metros cuadrados (160 pies cuadrados) y proporcionaban energía de corriente continua tanto regulada como no regulada; Se proporcionó energía no regulada al transmisor de radio y al módulo de aterrizaje.
Dos baterías recargables de níquel-cadmio de 30 amperios por hora proporcionaron energía cuando la nave espacial no estaba mirando hacia el Sol, durante el lanzamiento, mientras realizaba maniobras de corrección y también durante la ocultación de Marte.
Principales hallazgos

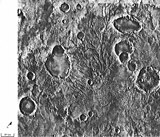
Al descubrir muchas formas geológicas que normalmente se forman a partir de grandes cantidades de agua, las imágenes de los orbitadores causaron una revolución en nuestras ideas sobre el agua en Marte. Se encontraron enormes valles fluviales en muchas áreas. Demostraron que las inundaciones de agua rompieron las presas, excavaron valles profundos, erosionaron surcos en el lecho rocoso y viajaron miles de kilómetros. Grandes áreas en el hemisferio sur contenían redes de arroyos ramificados, lo que sugiere que alguna vez llovió. Se cree que los flancos de algunos volcanes estuvieron expuestos a la lluvia porque se asemejan a las causadas en los volcanes de Hawái. Muchos cráteres parecen como si el impactador cayera en el lodo. Cuando se formaron, es posible que el hielo del suelo se haya derretido, convertido el suelo en lodo y luego fluido por la superficie. Normalmente, el material de un impacto sube y luego baja. No fluye por la superficie, sorteando obstáculos, como ocurre en algunos cráteres marcianos. Regiones, denominadas "Terreno caótico" parecía haber perdido rápidamente grandes volúmenes de agua, provocando la formación de grandes canales. La cantidad de agua involucrada se estimó en diez mil veces el caudal del río Mississippi. El vulcanismo subterráneo puede haber derretido el hielo congelado; Luego, el agua fluyó y el suelo se derrumbó para dejar un terreno caótico.

Las islas Streamlined muestran que grandes inundaciones ocurrieron en Marte.
()Cuadrángulo Lunae Palus)
Los patrones de cultivo fueron producidos por el agua corriente. El cráter Dromore está abajo.
()Cuadrángulo Lunae Palus)
Grandes inundaciones de agua probablemente erosionaron los canales alrededor del cráter Dromore.
()Cuadrángulo Lunae Palus)
Islas con forma de telar talladas por aguas inundadas de Ares Vallis.
()Oxia Palus quadrangle)
Imagen de tres valles: Vedra Valles, Maumee Valles y Maja Valles.
()Cuadrángulo Lunae Palus)
El cráter de Arandas puede estar encima de grandes cantidades de hielo de agua, que se fundieron cuando ocurrió el impacto, produciendo un eyecta similar al barro.
()Mare Acidalium quadrangle)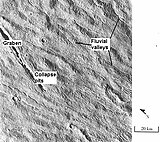
Canales que atraviesan Alba Mons.
()Cuadrícula de Arcadia)
Los canales ramificados en el cuadriángulo de Thaumasia proporcionan una posible evidencia de lluvia pasada en Marte.
Estos canales ramificados proporcionan una posible evidencia de lluvia pasada en Marte. ()Margaritifer Sinus quadrangle)

Ravi Vallis se formó posiblemente de inundaciones extremas.
()Margaritifer Sinus quadrangle)










Landers vikingos


Cada módulo de aterrizaje constaba de una base de aluminio de seis lados con lados alternos de 1,09 y 0,56 m (3 ft 7 in y 1 ft 10 in) de largo, apoyados en tres patas extendidas unidas a los lados más cortos. Las almohadillas de las piernas formaban los vértices de un triángulo equilátero con lados de 2,21 m (7 pies 3 pulgadas) cuando se veían desde arriba, con los lados largos de la base formando una línea recta con las dos almohadillas para los pies contiguas. La instrumentación estaba unida en el interior y en la parte superior de la base, elevada por encima de la superficie por las patas extendidas.
Cada módulo de aterrizaje estaba encerrado en un escudo térmico aeroshell diseñado para reducir la velocidad del módulo de aterrizaje durante la fase de entrada. Para evitar la contaminación de Marte por organismos terrestres, cada módulo de aterrizaje, una vez ensamblado y encerrado dentro del aeroshell, se encerró en un "bioescudo" presurizado; y luego esterilizado a una temperatura de 111 °C (232 °F) durante 40 horas. Por razones térmicas, la tapa del bioescudo se desechó después de que la etapa superior Centaur sacara de la órbita terrestre a la combinación de orbitador y módulo de aterrizaje Viking.
El astrónomo Carl Sagan ayudó a elegir los lugares de aterrizaje para ambas sondas Viking.
Entrada, Descenso y Aterrizaje (EDL)
Cada módulo de aterrizaje llegó a Marte unido al orbitador. La asamblea orbitó Marte muchas veces antes de que el módulo de aterrizaje fuera liberado y separado del orbitador para descender a la superficie. El descenso comprendió cuatro fases distintas, comenzando con una quema de salida de órbita. Luego, el módulo de aterrizaje experimentó la entrada a la atmósfera con un calentamiento máximo que se produjo unos segundos después del inicio del calentamiento por fricción con la atmósfera marciana. A una altitud de unos 6 kilómetros (3,7 millas) y viajando a una velocidad de 900 kilómetros por hora (600 mph), se desplegó el paracaídas, se soltó el aeroshell y se desplegaron las patas del módulo de aterrizaje. A una altitud de aproximadamente 1,5 kilómetros (5.000 pies), el módulo de aterrizaje activó sus tres retromotores y se soltó del paracaídas. El módulo de aterrizaje usó inmediatamente retrocohetes para frenar y controlar su descenso, con un aterrizaje suave en la superficie de Marte.

Al aterrizar (después de usar propulsor de cohetes), los módulos de aterrizaje tenían una masa de unos 600 kg.
Propulsión
La propulsión para la salida de órbita la proporcionaba el monopropulsor hidracina (N2H4), a través de un cohete de 12 toberas dispuestas en cuatro grupos de tres que proporcionaban 32 newtons (7,2 lbf) de empuje, lo que se traduce en un cambio de velocidad de 180 m/s (590 pies/s). Estas toberas también actuaron como propulsores de control para la traslación y rotación del módulo de aterrizaje.
El descenso terminal (después del uso de un paracaídas) y el aterrizaje utilizaron tres (uno colocado en cada lado largo de la base, separados por 120 grados) motores monopropulsores de hidracina. Los motores tenían 18 boquillas para dispersar los gases de escape y minimizar los efectos sobre el suelo, y se podían regular de 276 a 2667 newtons (62 a 600 lbf). La hidracina se purificó para evitar la contaminación de la superficie marciana con microbios terrestres. El módulo de aterrizaje transportaba 85 kg (187 lb) de propulsor en el lanzamiento, contenido en dos tanques esféricos de titanio montados en lados opuestos del módulo de aterrizaje debajo de los parabrisas RTG, dando una masa total de lanzamiento de 657 kg (1448 lb). El control se logró mediante el uso de una unidad de referencia inercial, cuatro giroscopios, un altímetro de radar, un radar de descenso y aterrizaje terminal y los propulsores de control.
Poder
La energía fue proporcionada por dos unidades generadoras termoeléctricas (RTG) de radioisótopos que contenían plutonio-238 colocadas en lados opuestos de la base del módulo de aterrizaje y cubiertas por pantallas contra el viento. Cada Viking RTG medía 28 cm (11 pulgadas) de alto, 58 cm (23 pulgadas) de diámetro, tenía una masa de 13,6 kg (30 lb) y proporcionaba 30 vatios de potencia continua a 4,4 voltios. También se encontraban a bordo cuatro baterías recargables selladas de níquel-cadmio de 8 Ah (28.800 coulombs) y 28 voltios de celda húmeda para manejar las cargas de potencia máxima.
Carga útil

Las comunicaciones se realizaron a través de un transmisor de banda S de 20 watts usando dos tubos de ondas viajeras. Se montó una antena parabólica orientable de alta ganancia de dos ejes en un brazo cerca de un borde de la base del módulo de aterrizaje. Una antena omnidireccional de banda S de baja ganancia también se extendía desde la base. Ambas antenas permitieron la comunicación directa con la Tierra, lo que permitió que Viking 1 continuara funcionando mucho después de que ambos orbitadores fallaran. Una antena UHF (381 MHz) proporcionó un relé unidireccional al orbitador usando una radio repetidora de 30 vatios. El almacenamiento de datos estaba en una grabadora de cinta de 40 Mbit y la computadora de aterrizaje tenía una memoria de 6000 palabras para instrucciones de comando.
El módulo de aterrizaje llevaba instrumentos para lograr los principales objetivos científicos de la misión del módulo de aterrizaje: estudiar la biología, la composición química (orgánica e inorgánica), la meteorología, la sismología, las propiedades magnéticas, la apariencia y las propiedades físicas de la superficie y la atmósfera marcianas. Se montaron dos cámaras de exploración cilíndricas de 360 grados cerca de un lado largo de la base. Desde el centro de este lado se extendía el brazo del muestreador, con un cabezal colector, un sensor de temperatura y un imán en el extremo. Un brazo meteorológico, sensores de temperatura de mantenimiento, dirección del viento y velocidad del viento se extendían hacia afuera y hacia arriba desde la parte superior de una de las patas del módulo de aterrizaje. Frente a las cámaras, cerca de la antena de alta ganancia, se montan un sismómetro, objetivos de prueba de cámara e imán y un espejo de aumento. Un compartimento interior ambientalmente controlado albergaba el experimento de biología y el espectrómetro de masas del cromatógrafo de gases. El espectrómetro de fluorescencia de rayos X también se montó dentro de la estructura. Se adjuntó un sensor de presión debajo del cuerpo del módulo de aterrizaje. La carga útil científica tenía una masa total de aproximadamente 91 kg (201 lb).
Experimentos biológicos
Los módulos de aterrizaje Viking realizaron experimentos biológicos diseñados para detectar vida en el suelo marciano (si existió) con experimentos diseñados por tres equipos separados, bajo la dirección del científico jefe Gerald Soffen de la NASA. Un experimento resultó positivo para la detección del metabolismo (vida actual), pero en base a los resultados de los otros dos experimentos que no pudieron revelar ninguna molécula orgánica en el suelo, la mayoría de los científicos se convencieron de que los resultados positivos probablemente fueron causados por factores no biológicos. reacciones químicas de condiciones de suelo altamente oxidantes.

Aunque hubo un pronunciamiento de la NASA durante la misión que decía que los resultados del módulo de aterrizaje Viking no demostraron firmas biológicas concluyentes en los suelos en los dos sitios de aterrizaje, los resultados de las pruebas y sus limitaciones aún están bajo evaluación. La validez de la 'Lanzamiento Etiquetado' (LR) Los resultados dependían completamente de la ausencia de un agente oxidante en el suelo marciano, pero el módulo de aterrizaje Phoenix descubrió uno más tarde en forma de sales de perclorato. Se ha propuesto que los compuestos orgánicos podrían haber estado presentes en el suelo analizado tanto por Viking 1 como por Viking 2, pero pasaron desapercibidos debido a la presencia de perclorato, detectado por Phoenix en 2008. Los investigadores descubrieron que el perclorato destruye los compuestos orgánicos cuando se calienta y produce clorometano y diclorometano, los compuestos de cloro idénticos descubiertos por ambos módulos de aterrizaje Viking cuando realizaron las mismas pruebas en Marte.
La cuestión de la vida microbiana en Marte sigue sin resolverse. No obstante, el 12 de abril de 2012, un equipo internacional de científicos informó estudios, basados en especulaciones matemáticas a través del análisis de complejidad de los experimentos Labeled Release de la Misión Viking de 1976, que pueden sugerir la detección de "vida microbiana existente en Marte". " Además, en 2018 se publicaron nuevos hallazgos del nuevo examen de los resultados del espectrómetro de masas del cromatógrafo de gases (GCMS).
Cámara/sistema de imágenes
El líder del equipo de imágenes fue Thomas A. Mutch, geólogo de la Universidad de Brown en Providence, Rhode Island. La cámara utiliza un espejo móvil para iluminar 12 fotodiodos. Cada uno de los 12 diodos de silicio está diseñado para ser sensible a diferentes frecuencias de luz. Se colocan varios diodos para enfocar con precisión a distancias entre seis y 43 pies del módulo de aterrizaje.
Las cámaras escanearon a una velocidad de cinco líneas de escaneo verticales por segundo, cada una compuesta por 512 píxeles. Las imágenes panorámicas de 300 grados estaban compuestas por 9150 líneas. El escaneo de las cámaras fue lo suficientemente lento como para que en una toma del equipo tomada durante el desarrollo del sistema de imágenes, varios miembros aparecieran varias veces en la toma mientras se movían mientras la cámara escaneaba.

Sistemas de control
Los módulos de aterrizaje Viking usaron una computadora de guía, control y secuenciación (GCSC) que constaba de dos computadoras Honeywell HDC 402 de 24 bits con 18 K de memoria de alambre plateado, mientras que los orbitadores Viking usaron un subsistema de computadora de comando (CCS) usando dos computadoras personalizadas. Procesadores seriales de 18 bits diseñados.
Coste financiero del programa Viking
Los dos orbitadores costaron 217 millones de dólares en ese momento, lo que equivale a unos 1 000 millones de dólares en 2021. La parte individual más costosa del programa fue la unidad de detección de vida del módulo de aterrizaje, que costó alrededor de $ 60 millones en ese momento o $ 300 millones en dólares de 2021. El desarrollo del diseño del módulo de aterrizaje Viking costó 357 millones de dólares. Esto fue décadas antes de que la NASA 'más rápido, mejor, más barato' Viking necesitaba ser pionero en tecnologías sin precedentes bajo la presión nacional provocada por la Guerra Fría y las secuelas de la carrera espacial, todo bajo la perspectiva de posiblemente descubrir vida extraterrestre por primera vez. Los experimentos tenían que adherirse a una directiva especial de 1971 que exigía que ningún fallo único detuviera el regreso de más de un experimento, una tarea difícil y costosa para un dispositivo con más de 40 000 piezas.
El desarrollo del sistema de cámara Viking costó 27,3 millones de dólares, o alrededor de 100 millones de dólares en 2021. Cuando se completó el diseño del sistema de imágenes, fue difícil encontrar a alguien que pudiera fabricar su diseño avanzado. Posteriormente, se elogió a los administradores del programa por evitar la presión de optar por un sistema de imágenes más simple y menos avanzado, especialmente cuando las vistas se acumulaban. Sin embargo, el programa ahorró algo de dinero al eliminar un tercer módulo de aterrizaje y reducir la cantidad de experimentos en el módulo de aterrizaje..
En general, la NASA dice que se gastaron $ 1 000 millones en dólares de la década de 1970 en el programa, que cuando se ajusta a la inflación a dólares de 2021 es de aproximadamente $ 5 000 millones.
Fin de la misión
La nave finalmente falló, una por una, de la siguiente manera:
| Artesanía | Fecha de llegada | Fecha de cierre | Vida operacional | Causa del fracaso |
|---|---|---|---|---|
| Vikingo 2 orbitador | 7 de agosto de 1976 | 25 de julio de 1978 | 1 año, 11 meses, 18 días | Apaga después de la fuga de combustible en el sistema de propulsión. |
| Vikingo 2 lander | 3 de septiembre de 1976 | 11 de abril de 1980 | 3 años, 7 meses, 8 días | Apaga después de la batería. |
| Vikingo 1 orbitador | 19 de junio de 1976 | 17 de agosto de 1980 | 4 años, 1 mes, 19 días | Apaga después del agotamiento del combustible de control de actitudes. |
| Vikingo 1 lander | 20 de julio de 1976 | 13 de noviembre de 1982 | 6 años, 3 meses, 22 días | Apague después del error humano durante la actualización del software causó que la antena del remitente bajara, terminando el poder y la comunicación. |
El programa Viking finalizó el 21 de mayo de 1983. Para evitar un impacto inminente con Marte, la órbita del orbitador Viking 1 se elevó el 7 de agosto de 1980, antes de cerrarse 10 días después. El impacto y la contaminación potencial en la superficie del planeta es posible a partir de 2019.
El módulo de aterrizaje Viking 1 se encontró a unos 6 kilómetros de su lugar de aterrizaje planificado por el Mars Reconnaissance Orbiter en diciembre de 2006.
Artefacto de mensaje
Cada módulo de aterrizaje Viking llevaba un pequeño punto de microfilm que contenía los nombres de varios miles de personas que habían trabajado en la misión. Varias sondas espaciales anteriores habían llevado artefactos de mensajes, como la placa Pioneer y el Voyager Golden Record. Las sondas posteriores también llevaron memoriales o listas de nombres, como el rover Perseverance, que reconoce a los casi 11 millones de personas que se inscribieron para incluir sus nombres en la misión.
Ubicaciones del módulo de aterrizaje Viking

Contenido relacionado
Juan heno
Bandera de europa
Barandilla de Edward Mitchell