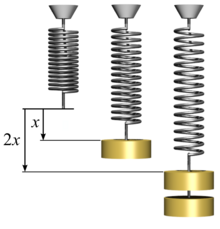
Derecho físico: fuerza necesaria para deformar una escala de primavera linealmente con distancia
Ley de Hooke: la fuerza es proporcional a la extensión

Los tubos Bourdon se basan en la ley de Hooke. La fuerza creada por la presión de gas dentro del tubo de metal en espiral por encima lo desbloquea por una cantidad proporcional a la presión.
La rueda de equilibrio en el núcleo de muchos relojes y relojes mecánicos depende de la ley de Hooke. Dado que el par generado por el muelle coilado es proporcional al ángulo girado por la rueda, sus oscilaciones tienen un período casi constante.
En física, la ley de Hooke es una ley empírica que establece que la fuerza (F) necesario para extender o comprimir un resorte por cierta distancia (x) se escala linealmente con respecto a esa distancia, es decir, Fs = kx, donde k es un factor constante característico del resorte (es decir, su rigidez), y x es pequeña en comparación con la deformación total posible del resorte. La ley lleva el nombre del físico británico del siglo XVII Robert Hooke. Primero declaró la ley en 1676 como un anagrama latino. Publicó la solución de su anagrama en 1678 como: ut tensio, sic vis ("como el extensión, por lo que la fuerza" o "la extensión es proporcional a la fuerza"). Hooke afirma en el trabajo de 1678 que conocía la ley desde 1660.
La ecuación de Hooke se cumple (hasta cierto punto) en muchas otras situaciones en las que se deforma un cuerpo elástico, como el viento que sopla sobre un edificio alto y un músico que toca la cuerda de una guitarra. Un cuerpo o material elástico para el que se puede asumir esta ecuación se dice que es lineal-elástico o hookeano.
La ley de Hooke es solo una aproximación lineal de primer orden a la respuesta real de resortes y otros cuerpos elásticos a las fuerzas aplicadas. Eventualmente debe fallar una vez que las fuerzas superan algún límite, ya que ningún material puede comprimirse más allá de un cierto tamaño mínimo, o estirarse más allá de un tamaño máximo, sin alguna deformación permanente o cambio de estado. Muchos materiales se desviarán notablemente de la ley de Hooke mucho antes de que se alcancen esos límites elásticos.
Por otro lado, la ley de Hooke es una aproximación precisa para la mayoría de los cuerpos sólidos, siempre que las fuerzas y las deformaciones sean lo suficientemente pequeñas. Por esta razón, la ley de Hooke se usa ampliamente en todas las ramas de la ciencia y la ingeniería, y es la base de muchas disciplinas como la sismología, la mecánica molecular y la acústica. También es el principio fundamental detrás de la escala de resorte, el manómetro, el galvanómetro y el volante del reloj mecánico.
La teoría moderna de la elasticidad generaliza la ley de Hooke para decir que la tensión (deformación) de un objeto o material elástico es proporcional a la tensión que se le aplica. Sin embargo, dado que las tensiones y deformaciones generales pueden tener múltiples componentes independientes, el "factor de proporcionalidad" puede que ya no sea solo un único número real, sino más bien un mapa lineal (un tensor) que puede representarse mediante una matriz de números reales.
En esta forma general, la ley de Hooke permite deducir la relación entre deformación y tensión para objetos complejos en términos de propiedades intrínsecas de los materiales de los que están hechos. Por ejemplo, se puede deducir que una barra homogénea con sección transversal uniforme se comportará como un simple resorte cuando se estire, con una rigidez k directamente proporcional al área de su sección transversal e inversamente proporcional a su longitud.
Definición formal
Para muelles lineales
Considere un resorte helicoidal simple que tiene un extremo unido a un objeto fijo, mientras que el extremo libre está siendo jalado por una fuerza cuya magnitud es Fs. Suponga que el resorte ha alcanzado un estado de equilibrio, donde su longitud ya no cambia. Sea x la cantidad en la que el extremo libre del resorte se desplazó de su posición "relajada" posición (cuando no se está estirando). La ley de Hooke establece que
x=Fsk{displaystyle x={frac {fnMicrosoft}} {fnMicrosoft}} {fnMicrosoft}}}}} {f}}}}}} {f}}}}} {f}}}}}}}} {f}}}}}}}}}}}}}}}} {f}} {f}}}}}}}}}

La ley de Hooke para un resorte a veces, pero rara vez, se establece bajo la convención de que Fs es la fuerza restauradora ejercida por el resorte sobre cualquier cosa que esté tirando de su extremo libre. En ese caso, la ecuación se convierte en
Fs=− − kx{displaystyle F_{s}=-kx}

General "escalar" muelles
La ley del resorte de Hooke generalmente se aplica a cualquier objeto elástico, de complejidad arbitraria, siempre que tanto la deformación como la tensión se puedan expresar mediante un solo número que puede ser tanto positivo como negativo.
Por ejemplo, cuando un bloque de caucho unido a dos placas paralelas se deforma por corte, en lugar de estiramiento o compresión, la fuerza de corte Fs y el desplazamiento lateral de las placas x obedecen la ley de Hooke (para deformaciones).
La ley de Hooke también se aplica cuando una barra de acero recta o una viga de hormigón (como las que se usan en los edificios), apoyada en ambos extremos, se dobla por un peso F colocado en algún punto intermedio. El desplazamiento x en este caso es la desviación de la viga, medida en la dirección transversal, con respecto a su forma sin carga.
La ley también se aplica cuando un cable de acero estirado se tuerce tirando de una palanca unida a un extremo. En este caso, la tensión Fs puede tomarse como la fuerza aplicada a la palanca, y x como la distancia recorrida por él a lo largo de su trayectoria circular. O, de manera equivalente, uno puede hacer que Fs sea el par aplicado por la palanca al final de el cable, y x el ángulo por el que gira ese extremo. En cualquier caso, Fs es proporcional a x (aunque la constante k es diferente en cada caso).
Formulación de vectores
En el caso de un resorte helicoidal que se estira o comprime a lo largo de su eje, la fuerza aplicada (o restauradora) y el alargamiento o compresión resultante tienen la misma dirección (que es la dirección de dicho eje). Por lo tanto, si Fs y x se definen como vectores, la ecuación de Hooke sigue siendo válida y dice que el vector de fuerza es el vector de elongación multiplicado por un escalar fijo.
Forma tensorial general
Algunos cuerpos elásticos se deformarán en una dirección cuando se sometan a una fuerza con una dirección diferente. Un ejemplo es una viga de madera horizontal con sección transversal rectangular no cuadrada que se dobla por una carga transversal que no es ni vertical ni horizontal. En tales casos, la magnitud del desplazamiento x será proporcional a la magnitud de la fuerza Fs, siempre que la dirección de este último siga siendo la misma (y su valor no sea demasiado grande); por lo que la versión escalar de la ley de Hooke Fs = −kx será sostener. Sin embargo, los vectores de fuerza y desplazamiento no serán múltiplos escalares entre sí, ya que tienen direcciones diferentes. Además, la relación k entre sus magnitudes dependerá de la dirección del vector Fs.
Sin embargo, en tales casos suele haber una relación lineal fija entre los vectores de fuerza y deformación, siempre que sean lo suficientemente pequeños. Es decir, hay una función κ de vectores a vectores, tal que F = κ(X), y κ(αX1 + βX2) = ακ(X1) + βκ(X2) para cualquier número real α, β y cualquier vector de desplazamiento X1, X2 . Tal función se llama tensor (de segundo orden).
Con respecto a un sistema de coordenadas cartesiano arbitrario, los vectores de fuerza y desplazamiento se pueden representar mediante matrices de números reales de 3 × 1. Luego, el tensor κ que los conecta se puede representar mediante una matriz de 3 × 3 κ de coeficientes reales, que multiplicados por el vector desplazamiento dan como resultado el vector fuerza:
F=[F1F2F3]=[κ κ 11κ κ 12κ κ 13κ κ 21κ κ 22κ κ 23κ κ 31κ κ 32κ κ 33][X1X2X3]=κ κ X{displaystyle mathbf {F} ,=,{begin{bmatrix}F_{1}F_{2}F_{3}end{bmatrix},=,{begin{bmatrix}kappa ################################################################################################################################################################################################################################################################ ################################################################################################################################################################################################################################################################ {kappa }mathbf {X}

Fi=κ κ i1X1+κ κ i2X2+κ κ i3X3{displaystyle F_{i}=kappa ¿Qué? _{i2}X_{2}+kappa _{i3}X_{3}

Ley de Hooke para medios continuos

a) Esquema de una nanoprima de polímero. El radio de bobina, R, pitch, P, longitud de la primavera, L, y el número de vueltas, N, son 2,5 μm, 2.0 μm, 13 μm y 4, respectivamente. Micrografos electrones de la nanoprima, antes de cargar (b-e), estirado (f), comprimido (g), doblado (h), y recuperado (i). Todas las barras de escala son de 2 μm. La primavera siguió una respuesta lineal contra la fuerza aplicada, demostrando la validez de la ley de Hooke en la nanoescala.
Las tensiones y deformaciones del material dentro de un material elástico continuo (como un bloque de caucho, la pared de una caldera o una barra de acero) están conectadas por una relación lineal que es matemáticamente similar a la de Hooke ley de resorte, y a menudo se le conoce por ese nombre.
Sin embargo, el estado de tensión en un medio sólido alrededor de algún punto no puede ser descrito por un solo vector. El mismo paquete de material, por pequeño que sea, se puede comprimir, estirar y cortar al mismo tiempo, en diferentes direcciones. Del mismo modo, las tensiones en esa parcela pueden ser a la vez de empuje, tracción y corte.
Para capturar esta complejidad, el estado relevante del medio alrededor de un punto debe representarse mediante tensores de dos segundos, el tensor de deformación ε (en lugar del desplazamiento X) y el tensor de tensión σ (reemplazando la fuerza de restauración F). Entonces, el análogo de la ley de resorte de Hooke para medios continuos es
σ σ =cε ε ,{displaystyle {boldsymbol {sigma }=Mathbf {c} {boldsymbol {varepsilon }}

ε ε =sσ σ ,{displaystyle {boldsymbol {varepsilon }=Mathbf {s} {boldsymbol {sigma}}}

En un sistema de coordenadas cartesianas, los tensores de tensión y deformación se pueden representar mediante matrices de 3 × 3
ε ε =[ε ε 11ε ε 12ε ε 13ε ε 21ε ε 22ε ε 23ε ε 31ε ε 32ε ε 33];σ σ =[σ σ 11σ σ 12σ σ 13σ σ 21σ σ 22σ σ 23σ σ 31σ σ 32σ σ 33]{displaystyle {boldsymbol {varepsilon },=,{begin{bmatrix}varepsilon - ¿Qué? - ¿Qué? ¿Qué? - ¿Qué? - ¿Qué? _{23}\\varepsilon - ¿Qué? - ¿Qué? ### {33}end{bmatrix},qquad {boldsymbol {sigma #,=,{begin{bmatrix}sigma ################################################################################################################################################################################################################################################################ ¿Por qué? ¿Por qué?

σ σ ij=.. k=13.. l=13cijklε ε kl{displaystyle sigma _{ij}=sum ###{k=1} {3}sum ¿Qué? ¿Qué?

Los tres tensores generalmente varían de un punto a otro dentro del medio y también pueden variar con el tiempo. El tensor de deformación ε simplemente especifica el desplazamiento de las partículas del medio en la vecindad del punto, mientras que el tensor de tensión σ especifica las fuerzas que las parcelas vecinas del medio ejercen entre sí. Por lo tanto, son independientes de la composición y estado físico del material. El tensor de rigidez c, por otro lado, es una propiedad del material y, a menudo, depende de variables de estado físico como temperatura, presión y microestructura
Debido a las simetrías inherentes de σ, ε, y c, solo 21 coeficientes elásticos de este último son independientes. Este número se puede reducir aún más por la simetría del material: 9 para un cristal ortorrómbico, 5 para una estructura hexagonal y 3 para una simetría cúbica. Para medios isotrópicos (que tienen las mismas propiedades físicas en cualquier dirección), c se puede reducir a solo dos números independientes, el módulo volumétrico K y el módulo de cortante G, que cuantifican la resistencia del material a los cambios de volumen y a las deformaciones por cortante, respectivamente.
Leyes análogas
Dado que la ley de Hooke es una simple proporcionalidad entre dos cantidades, sus fórmulas y consecuencias son matemáticamente similares a las de muchas otras leyes físicas, como las que describen el movimiento de los fluidos o la polarización de un dieléctrico por un campo eléctrico.
En particular, la ecuación tensorial σ = cε que relaciona las tensiones elásticas con las deformaciones es completamente similar a la ecuación τ = με̇ relacionando el tensor de tensión viscoso τ y el tensor de velocidad de deformación ε̇ en flujos de fluidos viscosos; aunque el primero pertenece a las tensiones estáticas (relacionadas con la cantidad de deformación) mientras que el segundo pertenece a las tensiones dinámicas (relacionadas con la tasa de deformación).
Unidades de medida
En unidades SI, los desplazamientos se miden en metros (m) y las fuerzas en newtons (N o kg·m/s2). Por lo tanto, la constante de resorte k, y cada elemento del tensor κ, se mide en newtons por metro (N/m), o kilogramos por segundo al cuadrado (kg/s2).
Para medios continuos, cada elemento del tensor de tensión σ es una fuerza dividida por un área; por lo tanto, se mide en unidades de presión, a saber, pascales (Pa, o N/m2, o kg/(m·s2). Los elementos del tensor de deformación ε son adimensionales (desplazamientos divididos por distancias). Por lo tanto, las entradas de cijkl también se expresan en unidades de presión.
Aplicación general a materiales elásticos

Curva de estréctil para acero con bajas emisiones de carbono, mostrando la relación entre el estrés (fuerza por área unitaria) y la cepa (resultar compresión/estiramiento, conocida como deformación). La ley de Hooke sólo es válida para la parte de la curva entre el origen y el punto de rendimiento (2).
- Fuerza máxima
- Fuerza de rendimiento (punto de rendimiento)
- Rupture
- Región de endurecimiento de heces
- Región de bloqueo
- Estreso aparente (F/A0)
- El estrés realF/A)
Los objetos que recuperan rápidamente su forma original después de ser deformados por una fuerza, con las moléculas o átomos de su material volviendo al estado inicial de equilibrio estable, a menudo obedecen la ley de Hooke.
La ley de Hooke solo se cumple para algunos materiales bajo ciertas condiciones de carga. El acero exhibe un comportamiento elástico lineal en la mayoría de las aplicaciones de ingeniería; La ley de Hooke es válida para él en todo su rango elástico (es decir, para tensiones por debajo del límite elástico). Para algunos otros materiales, como el aluminio, la ley de Hooke solo es válida para una parte del rango elástico. Para estos materiales se define una tensión límite proporcional por debajo de la cual los errores asociados a la aproximación lineal son despreciables.
El caucho generalmente se considera un producto "no Hookeano" porque su elasticidad depende de la tensión y es sensible a la temperatura y la tasa de carga.
Las generalizaciones de la ley de Hooke para el caso de grandes deformaciones las proporcionan los modelos de sólidos neohookeanos y sólidos de Mooney-Rivlin.
Fórmulas derivadas
Esfuerzo tensional de una barra uniforme
Una varilla de cualquier material elástico puede verse como un resorte lineal. La varilla tiene una longitud L y un área transversal A. Su tensión de tracción σ es linealmente proporcional a su extensión fraccionaria o deformación ε por el módulo de elasticidad E:
σ σ =Eε ε .{displaystyle sigma =Evarepsilon.}

El módulo de elasticidad a menudo se puede considerar constante. Sucesivamente,
ε ε =Δ Δ LL{displaystyle varepsilon ={frac {Delta L}{L}}}

σ σ =FA,{displaystyle sigma ={frac {F} {A},}

ε ε =σ σ E=FAE.{displaystyle varepsilon ={frac {sigma } {E}={frac {F},}

El cambio de longitud se puede expresar como
Δ Δ L=ε ε L=FLAE.{displaystyle Delta L=varepsilon L={frac {FL},}

Energía primaveral
La energía potencial Uel(x) almacenada en un resorte es dada por
Uel()x)=12kx2{displaystyle U_{mathrm}(x)={tfrac {2} kx^{2}

Este potencial Uel se puede visualizar como una parábola en el estilo Ux-plano tal que Uel(x) = 1/2kx2. A medida que el resorte se estira en la dirección positiva x, la energía potencial aumenta parabólicamente (lo mismo sucede cuando se comprime el resorte). Dado que el cambio en la energía potencial cambia a una tasa constante:
d2Ueldx2=k.{displaystyle {frac}U_{mathrm {el} - Sí.

Constantes de fuerza relajada (constantes de cumplimiento generalizadas)
Las constantes de fuerza relajadas (la inversa de las constantes de cumplimiento generalizadas) se definen de forma única para los sistemas moleculares, a diferencia de las constantes "rígidas" constantes de fuerza y, por lo tanto, su uso permite realizar correlaciones significativas entre los campos de fuerza calculados para los reactivos, los estados de transición y los productos de una reacción química. Así como la energía potencial se puede escribir como una forma cuadrática en las coordenadas internas, también se puede escribir en términos de fuerzas generalizadas. Los coeficientes resultantes se denominan constantes de cumplimiento. Existe un método directo para calcular la constante de cumplimiento para cualquier coordenada interna de una molécula, sin necesidad de realizar el análisis de modo normal. La idoneidad de las constantes de fuerza relajadas (constantes de cumplimiento inversas) como descriptores de la fuerza del enlace covalente se demostró ya en 1980. Recientemente, también se demostró la idoneidad como descriptores de la fuerza del enlace no covalente.
Oscilador armónico
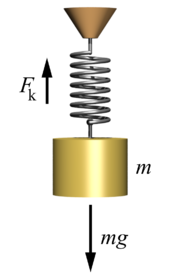
Una masa suspendida por una primavera es el ejemplo clásico de un oscilador armónico
Una masa m unida al extremo de un resorte es un ejemplo clásico de un oscilador armónico. Al tirar ligeramente de la masa y luego soltarla, el sistema se pondrá en movimiento oscilante sinusoidal alrededor de la posición de equilibrio. En la medida en que el resorte obedezca la ley de Hooke y se pueda despreciar la fricción y la masa del resorte, la amplitud de la oscilación permanecerá constante; y su frecuencia f será independiente de su amplitud, determinada únicamente por la masa y la rigidez del resorte:
f=12π π km{displaystyle f={frac}{2pi} }{sqrt {frac {k} {m}}}

Rotación en el espacio libre de gravedad
Si la masa m estuviera unida a un resorte con fuerza constante k y girando en el espacio libre, la tensión del resorte (Ft) proporcionaría la fuerza centrípeta requerida (Fc):
Ft=kx;Fc=m⋅ ⋅ 2r{displaystyle F_{mathrm {}=kx,qquad F_{mathrm {c}=momega ^{2}r}

k=m⋅ ⋅ 2{displaystyle k=momega }

f=12π π km{displaystyle f={frac}{2pi} }{sqrt {frac {k} {m}}}
Teoría de la elasticidad lineal para medios continuos
- Nota: la convención de sumación de Einstein sobre índices repetidos se utiliza a continuación.
Materiales isotrópicos
Los materiales isotrópicos se caracterizan por propiedades que son independientes de la dirección en el espacio. Por lo tanto, las ecuaciones físicas que involucran materiales isotrópicos deben ser independientes del sistema de coordenadas elegido para representarlas. El tensor de deformación es un tensor simétrico. Dado que la traza de cualquier tensor es independiente de cualquier sistema de coordenadas, la descomposición libre de coordenadas más completa de un tensor simétrico es representarlo como la suma de un tensor constante y un tensor simétrico sin traza. Así en notación de índice:
ε ε ij=()13ε ε kkδ δ ij)+()ε ε ij− − 13ε ε kkδ δ ij){displaystyle varepsilon _{ij}=left({tfrac {1}{3}varepsilon _{kk}delta _{ij}right)+left(varepsilon) ¿Qué? {1}{3}varepsilon ¿Por qué?

ε ε =vol ()ε ε )+dev ()ε ε );vol ()ε ε )=13tr ()ε ε )I;dev ()ε ε )=ε ε − − vol ()ε ε ){displaystyle {boldsymbol {varepsilon {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} ({boldsymbol {varepsilon })={boldsymbol {varepsilon - ¿Qué?

El primer término a la derecha es el tensor constante, también conocido como tensor de deformación volumétrica, y el segundo término es el tensor simétrico sin trazas, también conocido como tensor de deformación desviadora o tensor de cortante.
La forma más general de la ley de Hooke para materiales isotrópicos ahora se puede escribir como una combinación lineal de estos dos tensores:
σ σ ij=3K()13ε ε kkδ δ ij)+2G()ε ε ij− − 13ε ε kkδ δ ij);σ σ =3Kvol ()ε ε )+2Gdev ()ε ε ){displaystyle sigma _{ij}=3Kleft({tfrac {1}{3}varepsilon _{kk}delta _{ij}right)+2Gleft(varepsilon) ¿Qué? {1}{3}varepsilon ¿Por qué? {sigma [}=3Koperatorname {vol} ({boldsymbol {varepsilon })+2Goperatorname {dev} ({boldsymbol {varepsilon }})}}

Utilizando las relaciones entre los modulos elásticos, estas ecuaciones también se pueden expresar de diversas maneras. Una forma común de la ley de Hooke para materiales isotrópicos, expresada en notación directa de tensor, es
σ σ =λ λ tr ()ε ε )I+2μ μ ε ε =c:ε ε ;c=λ λ I⊗ ⊗ I+2μ μ I{displaystyle {boldsymbol {sigma }=lambda operatorname {tr} ({boldsymbol {varepsilon }})mathbf {I} +2mu {boldsymbol {varepsilon }={mathsf {c}:{boldsymbol {varepsilon },qquad {mathsf {c}=lambda mathbf {I} otimes mathbf {I} +2mu {mathsf {I}} Donde λ = K − 2/3G = c1111 − 2c1212 y μ = G = c1212 son las constantes de Lamé, I es el segundo tensor de identidad, y I es la parte simétrica del tensor de identidad de cuarto rango. En la notación de índice:
Donde λ = K − 2/3G = c1111 − 2c1212 y μ = G = c1212 son las constantes de Lamé, I es el segundo tensor de identidad, y I es la parte simétrica del tensor de identidad de cuarto rango. En la notación de índice:
σ σ ij=λ λ ε ε kkδ δ ij+2μ μ ε ε ij=cijklε ε kl;cijkl=λ λ δ δ ijδ δ kl+μ μ ()δ δ ikδ δ jl+δ δ ilδ δ jk){displaystyle sigma _{ij}=lambda varepsilon - ¿Qué? _{ij}+2mu varepsilon ¿Qué? ¿Qué? c_{ijkl}=lambda delta ¿Por qué? ¿Por qué? ¿Por qué? _{jl}+delta _{il}delta _{jk}right)}

ε ε =12μ μ σ σ − − λ λ 2μ μ ()3λ λ +2μ μ )tr ()σ σ )I=12Gσ σ +()19K− − 16G)tr ()σ σ )I{displaystyle {boldsymbol {varepsilon {fnMicroc}{2mu }{boldsymbol {sigma {fnMicroc {lambda}{2mu (3lambda +2mu)}operatorname {tr} ({boldsymbol {sigma})mathbf {} ={frac {1}{2G}}{boldsymbol {sigma}+left({frac {1}{9K}-{frac {1} {6G}right)operatorname {tr} ({boldsymbol {sigma}})mathbf {I}

s=− − λ λ 2μ μ ()3λ λ +2μ μ )I⊗ ⊗ I+12μ μ I=()19K− − 16G)I⊗ ⊗ I+12GI{displaystyle {mathsf {}=-{frac {lambda }{2mu (3lambda +2mu)}}mathbf {I}otimes mathbf {I} +{frac {1}{2mu} {fnMicrosoft Sans Serif}=left({frac {1}{9K}-{frac {1}{6G}right)mathbf {I} otimes mathbf {} {fnMicroc {1} {fnMicrosoft}} {fnMicrosoft Sans Serif}} {f}} {fnMicroc}} {f}}} {fnMicrosoft}}} {f}}}} {f}} {f}} {fnMitsss}}}}}}}}}}}}}}}}}}} {f}}}}}}} {f}}}}}}}}}}} {f}}}}}}} {f}}}}} {f}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}} {f}}}} {f}}}} {f}} {f}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}

ε ε ij=1E()σ σ ij− − .. ()σ σ kkδ δ ij− − σ σ ij));ε ε =1E()σ σ − − .. ()tr ()σ σ )I− − σ σ ))=1+.. Eσ σ − − .. Etr ()σ σ )I{displaystyle varepsilon ¿Qué? {1}{E} {big (}sigma _{ij}-nu (sigma _{kk}delta _{ij}-sigma _{ij}){big)};qquad {boldsymbol {varepsilonlon {fnMicroc {}} {big {fnMicrosoft Sans Serif} {sigma}-nu (operatorname {tr} ({boldsymbol {sigma })mathbf {} -{boldsymbol {sigma }}} {bignu)}= {i}= {fnun}}}}} {fnun}}}}}} {m}}}}}}}} {m} {f}}}}}}} {ccm}} {cm}}}}}}}}}}} {c\cm}}} {cccccccccccccccccccccH0}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {fnMicrosoft Sans} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f}}} {fnMicrosoft}} {fnMicrosoft}}} {fnMicrosoft}} {f}}}} {f}}}}}} {f}}}}} {f}}}}}} {f}}}}}}}}}\\\\\\m}}}\\m}mm}}\mmmmmm}mm}}}}}}}}}}}}}}}}}}\mmmmmm}mmmmmmmmmmmm}}}}}}}mm}mmmmmmmmmmmmm} }-{frac {nu - ¿Qué?

ε ε 11=1E()σ σ 11− − .. ()σ σ 22+σ σ 33))ε ε 22=1E()σ σ 22− − .. ()σ σ 11+σ σ 33))ε ε 33=1E()σ σ 33− − .. ()σ σ 11+σ σ 22))ε ε 12=12Gσ σ 12;ε ε 13=12Gσ σ 13;ε ε 23=12Gσ σ 23{displaystyle {begin{aligned}varepsilon _{11}={frac {1}{big (}sigma _{11}-nu (sigma _{22}+sigma _{33}){big)}\varepsilon ¿Por qué? - ¿Qué? {1}{big (}sigma _{33}-nu (sigma _{11}+sigma _{22}){big)}\varepsilon _{12}={frac {1}{2G}sigma _{12},qquad varepsilon _{13}={2G}sigma _{13},qquad varepsilon {23}={2G}sigma _{23}end{aligned}}

Derivación de la ley de Hooke en tres dimensionesLa forma tridimensional de la ley de Hooke puede derivarse usando la relación de Poisson y la forma unidimensional de la ley de Hooke como sigue.
Considere la relación de tensión y estrés como una superposición de dos efectos: estirar en dirección de la carga (1) y reducir (causado por la carga) en direcciones perpendiculares (2 y 3),
ε ε 1.=1Eσ σ 1,ε ε 2.=− − .. Eσ σ 1,ε ε 3.=− − .. Eσ σ 1,{displaystyle {begin{aligned}varepsilon ¿Por qué? } {E}sigma ¿Por qué? - ¿Qué?

Donde
. es la relación de Poisson y
E Es el módulo de Young.
Conseguimos ecuaciones similares a las cargas en direcciones 2 y 3,
ε ε 1.=− − .. Eσ σ 2,ε ε 2.=1Eσ σ 2,ε ε 3.=− − .. Eσ σ 2,{displaystyle {begin{aligned}varepsilon _{1}'''''''' limit=-{frac {nu } {E}sigma ¿Qué? {1} {E}sigma ¿Qué? ¿Qué? - ¿Qué?

y
ε ε 1′′=− − .. Eσ σ 3,ε ε 2′′=− − .. Eσ σ 3,ε ε 3′′=1Eσ σ 3.{displaystyle {begin{aligned}varepsilon _{1}''''''''''''''''''''''''''''''''''' ¿Qué? } {E}sigma ¿Qué? ¿Qué? {1} {E}sigma ¿Qué?

Resumiendo los tres casos juntos (εi = εi′ + εi′′ + εi′′)
ε ε 1=1E()σ σ 1− − .. ()σ σ 2+σ σ 3)),ε ε 2=1E()σ σ 2− − .. ()σ σ 1+σ σ 3)),ε ε 3=1E()σ σ 3− − .. ()σ σ 1+σ σ 2)),{displaystyle {begin{aligned}varepsilon ################################################################################################################################################################################################################################################################ {1}{E}{big (}sigma _{1}-nu (sigma _{2}+sigma _{3}){big)},\varepsilon - ¿Qué? {1}} {big (}sigma _{2}-nu (sigma _{1}+sigma _{3}){big)},varepsilon ################################################################################################################################################################################################################################################################ {1} {} {big (}sigma _{3}-nu (sigma _{1}+sigma _{2}){big)},end{aligned}}}}}} {fnun}}}

o añadiendo y restando uno
νσε ε 1=1E()()1+.. )σ σ 1− − .. ()σ σ 1+σ σ 2+σ σ 3)),ε ε 2=1E()()1+.. )σ σ 2− − .. ()σ σ 1+σ σ 2+σ σ 3)),ε ε 3=1E()()1+.. )σ σ 3− − .. ()σ σ 1+σ σ 2+σ σ 3)),{displaystyle {begin{aligned}varepsilon ################################################################################################################################################################################################################################################################ {1}{E}{big (}(1+nu)sigma _{1}-nu (sigma _{1}+sigma) ¿Qué? - ¿Qué? {1}{E}{big (}(1+nu)sigma _{2}-nu (sigma _{1}+sigma) ¿Qué? ################################################################################################################################################################################################################################################################ {1}{E}{big (}(1+nu)sigma _{3}-nu (sigma _{1}+sigma) ¿Por qué?

y más adelante conseguiremos resolver
σ1σ σ 1=E1+.. ε ε 1+.. 1+.. ()σ σ 1+σ σ 2+σ σ 3).{displaystyle sigma ¿Qué? ¿Qué? _{1}+sigma _{2}+sigma _{3}),.}

Calculando la suma
ε ε 1+ε ε 2+ε ε 3=1E()()1+.. )()σ σ 1+σ σ 2+σ σ 3)− − 3.. ()σ σ 1+σ σ 2+σ σ 3))=1− − 2.. E()σ σ 1+σ σ 2+σ σ 3)σ σ 1+σ σ 2+σ σ 3=E1− − 2.. ()ε ε 1+ε ε 2+ε ε 3){displaystyle {begin{aligned}varepsilon _{1}+varepsilon _{2}+varepsilon ################################################################################################################################################################################################################################################################ {1}{E}{big (}(1+nu)(sigma) _{1}+sigma _{2}+sigma _{3})-3nu (sigma _{1}+sigma - ¿Por qué? } {E}(sigma _{1}+sigma _{2}+sigma ¿Por qué? _{1}+sigma _{2}+sigma {fnMicrosoft Sans Serif} _{1}+varepsilon _{2}+varepsilon ¿Qué?

y sustitución a la ecuación resuelta
σ1 da
σ σ 1=E1+.. ε ε 1+E.. ()1+.. )()1− − 2.. )()ε ε 1+ε ε 2+ε ε 3)=2μ μ ε ε 1+λ λ ()ε ε 1+ε ε 2+ε ε 3),{displaystyle {begin{aligned}sigma ¿Qué? ¿Por qué? _{1}+varepsilon _{2}+varepsilon ¿Por qué? _{1}+lambda (varepsilon _{1}+varepsilon ¿Qué?

Donde
μ y
λ son los parámetros de Lamé.
Tratamiento similar de las direcciones 2 y 3 da la ley del Hooke en tres dimensiones.
En forma matricial, la ley de Hooke para materiales isotrópicos se puede escribir como
[ε ε 11ε ε 22ε ε 332ε ε 232ε ε 132ε ε 12]=[ε ε 11ε ε 22ε ε 33γ γ 23γ γ 13γ γ 12]=1E[1− − .. − − .. 000− − .. 1− − .. 000− − .. − − .. 10000002+2.. 0000002+2.. 0000002+2.. ][σ σ 11σ σ 22σ σ 33σ σ 23σ σ 13σ σ 12]{displaystyle {begin{bmatrix}varepsilon _{11}\\varepsilon ¿Por qué? _{33}2varepsilon _{23}2varepsilon _{13}2varepsilon _{12}end{bmatrix}},=,{begin{bmatrix}varepsilon _{11}\\varepsilon ¿Por qué? ¿Por qué? {12}begin{bmatrix}},=,{frac {1}{begin{bmatrix}1 limit-nu &-nu &-nu &0 simultáneamente0\--nu >1 limite-nu > }-nu > {}begin{bmatrix}sigma} ¿Qué? ¿Por qué?

[σ σ 11σ σ 22σ σ 33σ σ 23σ σ 13σ σ 12]=E()1+.. )()1− − 2.. )[1− − .. .. .. 000.. 1− − .. .. 000.. .. 1− − .. 0000001− − 2.. 20000001− − 2.. 20000001− − 2.. 2][ε ε 11ε ε 22ε ε 332ε ε 232ε ε 132ε ε 12]{displaystyle {begin{bmatrix}sigma ¿Qué? _{22}\sigma _{33}\sigma _{23}\sigma _{13}\sigma _{12}end{bmatrix},=,{frac {E}{(1+nu)}{begin{bmatrix}1-nu < > > < < > < > > > > > > > > > > > > > > > > > >...... }{2} {1-2nu }{2} {2}end{bmatrix}{begin{bmatrix}varepsilon _{11}\\varepsilon ¿Por qué? _{33}2varepsilon _{23}2varepsilon _{13}2varepsilon _{12}end{bmatrix}}

[σ σ 11σ σ 22σ σ 33σ σ 23σ σ 13σ σ 12]=[2μ μ +λ λ λ λ λ λ 000λ λ 2μ μ +λ λ λ λ 000λ λ λ λ 2μ μ +λ λ 000000μ μ 000000μ μ 000000μ μ ][ε ε 11ε ε 22ε ε 332ε ε 232ε ε 132ε ε 12]{displaystyle {begin{bmatrix}sigma ¿Qué? _{22}\\sigma _{33}\sigma ¿Por qué? _{13}\\\sigma ################################################################################################################################################################################################################################################################ +lambda " Lambda " < < < > > > > > > > > > > > > > > > > > > > > > > > & > & > > & > > > > > > > > > > > > > > > > > > > > > > > > > < > > > > > 2mu +lambda {}begin{bmatrix}varepsilon _{11}\\varepsilon ¿Por qué? _{33}2varepsilon _{23}2varepsilon _{13}2varepsilon _{12}end{bmatrix}}

[σ σ 11σ σ 12σ σ 13σ σ 12σ σ 22σ σ 23σ σ 13σ σ 23σ σ 33]=2μ μ [ε ε 11ε ε 12ε ε 13ε ε 12ε ε 22ε ε 23ε ε 13ε ε 23ε ε 33]+λ λ I()ε ε 11+ε ε 22+ε ε 33){displaystyle {begin{bmatrix}sigma ################################################################################################################################################################################################################################################################ - ¿Qué? _{13}\\\sigma - ¿Qué? - ¿Qué? ¿Por qué? ################################################################################################################################################################################################################################################################ - ¿Qué? ¿Por qué? - ¿Qué? - ¿Qué? ¿Qué? - ¿Qué? - ¿Qué? _{23}\\varepsilon ################################################################################################################################################################################################################################################################ - ¿Qué? {33}end{bmatrix}+lambda mathbf {I} left(varepsilon) _{11}+varepsilon _{22}+varepsilon _{33}right)}

Estrés plano
Bajo condiciones de estrés plano, σ31 = σ13 = σ32 = σ23 = σ33 = 0. En ese caso la ley de Hooke toma la forma
[σ σ 11σ σ 22σ σ 12]=E1− − .. 2[1.. 0.. 10001− − .. 2][ε ε 11ε ε 222ε ε 12]{displaystyle {begin{bmatrix}sigma ¿Por qué? ¿Por qué? ### {2}}{begin{bmatrix}1 ânu &0\\nu > âTMa {1-nu {begin{bmatrix}varepsilon _{11}\\varepsilon ¿Qué?

En notación vectorial esto se convierte en
[σ σ 11σ σ 12σ σ 12σ σ 22]=E1− − .. 2()()1− − .. )[ε ε 11ε ε 12ε ε 12ε ε 22]+.. I()ε ε 11+ε ε 22)){displaystyle {begin{bmatrix}sigma ################################################################################################################################################################################################################################################################ ¿Por qué? ################################################################################################################################################################################################################################################################ - ¿Qué? ¿Qué? - ¿Qué? ### {22}end{bmatrix}+nu mathbf {I} left(varepsilon _{11}+varepsilon _{22}right)}

La relación inversa generalmente se escribe en forma reducida
[ε ε 11ε ε 222ε ε 12]=1E[1− − .. 0− − .. 10002+2.. ][σ σ 11σ σ 22σ σ 12]{displaystyle {begin{bmatrix}varepsilon _{11}\\varepsilon _{22}2varepsilon _{12}end{bmatrix},=,{frac {1}{E}{begin{bmatrix}1 {nu &0\-nu >}}{begin{bmatrix}}{begin{bmatrix}sigma ¿Qué? ¿Por qué?

Deformación plana
Bajo condiciones de deformación plana, ε31 = ε13 = ε32 = ε23 = ε33 = 0. En este caso la ley de Hooke toma la forma
[σ σ 11σ σ 22σ σ 12]=E()1+.. )()1− − 2.. )[1− − .. .. 0.. 1− − .. 0001− − 2.. 2][ε ε 11ε ε 222ε ε 12]{displaystyle {begin{bmatrix}sigma ¿Qué? ################################################################################################################################################################################################################################################################ " Nu " ################################################################################################################################################################################################################################################################ _{11}\\varepsilon _{22}2varepsilon _{12}end{bmatrix}}

Materiales anisotrópicos
La simetría del tensor de tensión de Cauchy (σij = σji) y las leyes de Hooke generalizadas (σij = cijkl εkl) implica que cijkl = cjikl. De manera similar, la simetría del tensor de deformación infinitesimal implica que cijkl = cijlk. Estas simetrías se denominan simetrías menores del tensor de rigidez c. Esto reduce el número de constantes elásticas de 81 a 36.
Si además, dado que el gradiente de desplazamiento y la tensión de Cauchy son trabajo conjugado, la relación tensión-deformación puede derivarse de un funcional de densidad de energía de deformación (U), luego
σ σ ij=∂ ∂ U∂ ∂ ε ε ij⟹ ⟹ cijkl=∂ ∂ 2U∂ ∂ ε ε ij∂ ∂ ε ε kl.{displaystyle sigma _{ij}={frac {partial U}{partial varepsilon _{ij}}}quad implies quad c_{lijk}={frac {partial ^{2}U}{partial varepsilon _{ij}varepsilon.

Representación matricial (tensor de rigidez)
A menudo resulta útil expresar la forma anisotrópica de la ley de Hooke en notación matricial, también llamada notación de Voigt. Para hacer esto, aprovechamos la simetría de los tensores de tensión y deformación y los expresamos como vectores de seis dimensiones en un sistema de coordenadas ortonormales (e1,e2,e3) como
[σ σ ]=[σ σ 11σ σ 22σ σ 33σ σ 23σ σ 13σ σ 12]↑ ↑ [σ σ 1σ σ 2σ σ 3σ σ 4σ σ 5σ σ 6];[ε ε ]=[ε ε 11ε ε 22ε ε 332ε ε 232ε ε 132ε ε 12]↑ ↑ [ε ε 1ε ε 2ε ε 3ε ε 4ε ε 5ε ε 6]{displaystyle [{boldsymbol {sigma #,=,{begin{bmatrix}sigma ¿Qué? _{22}\\sigma _{33}\sigma ¿Por qué? ### {12}end{bmatrix},equiv ,{begin{bmatrix}sigma ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Qué? [{boldsymbol {varepsilon },=,{begin{bmatrix}varepsilon _{11}\\varepsilon ¿Por qué? _{33}2varepsilon _{23}2varepsilon _{13}2varepsilon _{12}end{bmatrix}},equiv ,{begin{bmatrix}varepsilon ¿Qué? ¿Qué? ¿Qué? ¿Qué? ¿Por qué? ¿Qué?
![{displaystyle [{boldsymbol {sigma }}],=,{begin{bmatrix}sigma _{11}\sigma _{22}\sigma _{33}\sigma _{23}\sigma _{13}\sigma _{12}end{bmatrix}},equiv ,{begin{bmatrix}sigma _{1}\sigma _{2}\sigma _{3}\sigma _{4}\sigma _{5}\sigma _{6}end{bmatrix}},;qquad [{boldsymbol {varepsilon }}],=,{begin{bmatrix}varepsilon _{11}\varepsilon _{22}\varepsilon _{33}\2varepsilon _{23}\2varepsilon _{13}\2varepsilon _{12}end{bmatrix}},equiv ,{begin{bmatrix}varepsilon _{1}\varepsilon _{2}\varepsilon _{3}\varepsilon _{4}\varepsilon _{5}\varepsilon _{6}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/99d84c34fc9efc62922b42a33f888656c62d794b)
[c]=[c1111c1122c1133c1123c1131c1112c2211c2222c2233c2223c2231c2212c3311c3322c3333c3323c3331c3312c2311c2322c2333c2323c2331c2312c3111c3122c3133c3123c3131c3112c1211c1222c1233c1223c1231c1212]↑ ↑ [C11C12C13C14C15C16C12C22C23C24C25C26C13C23C33C34C35C36C14C24C34C44C45C46C15C25C35C45C55C56C16C26C36C46C56C66]{23}{23}{12} {23}{12}}
![{displaystyle [{mathsf {c}}],=,{begin{bmatrix}c_{1111}&c_{1122}&c_{1133}&c_{1123}&c_{1131}&c_{1112}\c_{2211}&c_{2222}&c_{2233}&c_{2223}&c_{2231}&c_{2212}\c_{3311}&c_{3322}&c_{3333}&c_{3323}&c_{3331}&c_{3312}\c_{2311}&c_{2322}&c_{2333}&c_{2323}&c_{2331}&c_{2312}\c_{3111}&c_{3122}&c_{3133}&c_{3123}&c_{3131}&c_{3112}\c_{1211}&c_{1222}&c_{1233}&c_{1223}&c_{1231}&c_{1212}end{bmatrix}},equiv ,{begin{bmatrix}C_{11}&C_{12}&C_{13}&C_{14}&C_{15}&C_{16}\C_{12}&C_{22}&C_{23}&C_{24}&C_{25}&C_{26}\C_{13}&C_{23}&C_{33}&C_{34}&C_{35}&C_{36}\C_{14}&C_{24}&C_{34}&C_{44}&C_{45}&C_{46}\C_{15}&C_{25}&C_{35}&C_{45}&C_{55}&C_{56}\C_{16}&C_{26}&C_{36}&C_{46}&C_{56}&C_{66}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85c8bf05adff9dcaec56f4863dd039fae5986a79)
[σ σ ]=[C][ε ε ]oσ σ i=Cijε ε j.{displaystyle [{boldsymbol {sigma }]=[{mathsf {C}][{boldsymbol {varepsilon }}]qquad {text{or}qquad sigma ¿Qué? - ¿Qué?
![{displaystyle [{boldsymbol {sigma }}]=[{mathsf {C}}][{boldsymbol {varepsilon }}]qquad {text{or}}qquad sigma _{i}=C_{ij}varepsilon _{j},.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2f0315b5cfc25f83e499fadf8ce4921e11340f8e)
[s]=[s1111s1122s11332s11232s11312s1112s2211s2222s22332s22232s22312s2212s3311s3322s33332s33232s33312s33122s23112s23222s23334s23234s23314s23122s31112s31222s31334s31234s31314s31122s12112s12222s12334s12234s12314s1212]↑ ↑ [S11S12S13S14S15S16S12S22S23S24S25S26S13S23S33S34S35S36S14S24S34S44S45S46S15S25S35S45S55S56S16S26S36S46S56S66]{23}{12}{12}
![{displaystyle [{mathsf {s}}],=,{begin{bmatrix}s_{1111}&s_{1122}&s_{1133}&2s_{1123}&2s_{1131}&2s_{1112}\s_{2211}&s_{2222}&s_{2233}&2s_{2223}&2s_{2231}&2s_{2212}\s_{3311}&s_{3322}&s_{3333}&2s_{3323}&2s_{3331}&2s_{3312}\2s_{2311}&2s_{2322}&2s_{2333}&4s_{2323}&4s_{2331}&4s_{2312}\2s_{3111}&2s_{3122}&2s_{3133}&4s_{3123}&4s_{3131}&4s_{3112}\2s_{1211}&2s_{1222}&2s_{1233}&4s_{1223}&4s_{1231}&4s_{1212}end{bmatrix}},equiv ,{begin{bmatrix}S_{11}&S_{12}&S_{13}&S_{14}&S_{15}&S_{16}\S_{12}&S_{22}&S_{23}&S_{24}&S_{25}&S_{26}\S_{13}&S_{23}&S_{33}&S_{34}&S_{35}&S_{36}\S_{14}&S_{24}&S_{34}&S_{44}&S_{45}&S_{46}\S_{15}&S_{25}&S_{35}&S_{45}&S_{55}&S_{56}\S_{16}&S_{26}&S_{36}&S_{46}&S_{56}&S_{66}end{bmatrix}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/34760b2d8ef86f720051aebe5a45a65b312bcab6)
Cambio de sistema de coordenadas
Si un material elástico lineal se rota de una configuración de referencia a otra, entonces el material es simétrico con respecto a la rotación si los componentes del tensor de rigidez en la configuración rotada están relacionados con los componentes en la configuración de referencia por la relación
cpqrs=lpilqjlrklslcijkl{displaystyle ¿Qué?

En notación matricial, si la base transformada (rotada o invertida) está relacionada con la base de referencia por
[ei.]=[L][ei]{displaystyle [mathbf {e}]=[L] [Mathbf {e} _{i}]
![{displaystyle [mathbf {e} _{i}']=[L][mathbf {e} _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/213d0bb55cc1da894c855871790e09d78635c17b)
Cijε ε iε ε j=Cij.ε ε i.ε ε j..{displaystyle C_{ij}varepsilon _{i}varepsilon ¿Qué? Varepsilon '

Cij=Cij.⟹ ⟹ Cij()ε ε iε ε j− − ε ε i.ε ε j.)=0.{displaystyle C_{ij}=C'_{ij}quad implies quad C_{ij}(varepsilon _{i}varepsilon _{j}-varepsilon Varepsilon - Sí.

Materiales ortotrópicos
Los materiales ortotrópicos tienen tres planos ortogonales de simetría. Si los vectores base (e1,e2, e3) son normales a los planos de simetría, entonces las relaciones de transformación de coordenadas implican que
[σ σ 1σ σ 2σ σ 3σ σ 4σ σ 5σ σ 6]=[C11C12C13000C12C22C23000C13C23C33000000C44000000C55000000C66][ε ε 1ε ε 2ε ε 3ε ε 4ε ε 5ε ε 6]{displaystyle {begin{bmatrix}sigma ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? {0} {0} {0} {0} {0}}} {0}}} {0}}} {0} {0}} {0} {0} {0} {0} {0} {0} {0} {0} {0}} {0}} {0}} {0}} {0} {0}}} {0}}}}}}} {0}}}} {0}}}}}}}}}}}}}}}}}}}}}}}}} {0} {0} {0} {0} {0}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} ¿Qué? ¿Qué? ¿Qué? ¿Qué? ¿Por qué? ¿Qué?

[ε ε xxε ε Sí.Sí.ε ε zz2ε ε Sí.z2ε ε zx2ε ε xSí.]=[1Ex− − .. Sí.xESí.− − .. zxEz000− − .. xSí.Ex1ESí.− − .. zSí.Ez000− − .. xzEx− − .. Sí.zESí.1Ez0000001GSí.z0000001Gzx0000001GxSí.][σ σ xxσ σ Sí.Sí.σ σ zzσ σ Sí.zσ σ zxσ σ xSí.]{displaystyle {begin{bmatrix}varepsilon ¿Por qué? ¿Por qué? ¿Qué? ¿Por qué? ¿Por qué? {1}{E_{x}} {frac} # - ¿Qué? {fnK} {fnK} {fnK}} {fnK}}} {fnK}}} {fn}}}} {fn}}} {fnfnfn}}}}} {fn}}}}}} {\\\fn\fn\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fn # {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft} {fnMicrosoft Sans Serif} {1}{E_{y}} {frac} {fnK} {fnK}} {fnK}} {fnK}}} {fn}}} {fn} {fnf}}}}} {fnfn}}}}}} {fnf}}}}}}} {\\\fn\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fn {fnH00} {fnK}} {fnK}} {fnK}}} {fn}} {fn}} {fnfn}}}}}} {fnfnfnfnH00}}}}} {fnf}}} {fnH00}}}}}}}}}}}}}}}} {\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fnH # {fnK} {fnMicroc} {1}{E_{z} {0}}} {1}{G_{yz}} {0}}}} {0} {0} {0} {0}}}}} {0}} {1}{G_{zx}}} {0}}} {begin{bmatrix}sigmatrix}}} {begin{bmatrix}}sigma ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Qué?

- Ei es el módulo de Young a lo largo del eje i
- Gij es el módulo de esquila en dirección j en el plano cuya normalidad está en dirección i
- .ij es la relación del Poisson que corresponde a una contracción en dirección j cuando se aplica una extensión en dirección i.
Bajo condiciones de tensión plana, σzz = σzx = σyz = 0, la ley de Hooke para un material ortotrópico toma la forma
[ε ε xxε ε Sí.Sí.2ε ε xSí.]=[1Ex− − .. Sí.xESí.0− − .. xSí.Ex1ESí.0001GxSí.][σ σ xxσ σ Sí.Sí.σ σ xSí.].{displaystyle {begin{bmatrix}varepsilon ¿Por qué? ¿Qué? ¿Por qué? {1}{E_{x}} {frac} # - ¿Qué? # {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft} {fnMicrosoft Sans Serif} {1}{E_{y} {0} {0}} {1}{G_{xy}}end{bmatrix} {begin{bmatrix}sigma ¿Por qué? ¿Qué? ¿Qué?

[σ σ xxσ σ Sí.Sí.σ σ xSí.]=11− − .. xSí... Sí.x[Ex.. Sí.xEx0.. xSí.ESí.ESí.000GxSí.()1− − .. xSí... Sí.x)][ε ε xxε ε Sí.Sí.2ε ε xSí.].{displaystyle {begin{bmatrix}sigma ¿Por qué? ¿Qué? ################################################################################################################################################################################################################################################################ {yx} {begin{bmatrix}E_{x} - ¿Qué? ################################################################################################################################################################################################################################################################ ¿Por qué? ¿Qué? ¿Qué?

Materiales transversalmente isotrópicos
Un material transversalmente isótropo es simétrico con respecto a una rotación alrededor de un eje de simetría. Para tal material, si e3 es el eje de simetría, la ley de Hooke se puede expresar como
[σ σ 1σ σ 2σ σ 3σ σ 4σ σ 5σ σ 6]=[C11C12C13000C12C11C13000C13C13C33000000C44000000C44000000C11− − C122][ε ε 1ε ε 2ε ε 3ε ε 4ε ε 5ε ε 6]{displaystyle {begin{bmatrix}sigma ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? {0} {0} {0} {0}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {C_{11}-C_{2}end{bmatrix}{begin{bmatrix}varepsilon ¿Qué? ¿Qué? ¿Qué? ¿Qué? ¿Por qué? ¿Qué?

Más frecuentemente, el eje x ≡ e1 se toma como el eje de simetría y la inversa de la ley de Hooke se escribe como
[ε ε xxε ε Sí.Sí.ε ε zz2ε ε Sí.z2ε ε zx2ε ε xSí.]=[1Ex− − .. Sí.xESí.− − .. zxEz000− − .. xSí.Ex1ESí.− − .. zSí.Ez000− − .. xzEx− − .. Sí.zESí.1Ez0000001GSí.z0000001Gxz0000001GxSí.][σ σ xxσ σ Sí.Sí.σ σ zzσ σ Sí.zσ σ zxσ σ xSí.]{displaystyle {begin{bmatrix}varepsilon ¿Por qué? ¿Por qué? ¿Qué? ¿Por qué? ¿Por qué? {1}{E_{x}} {frac} # - ¿Qué? {fnK} {fnK} {fnK}} {fnK}}} {fnK}}} {fn}}}} {fn}}} {fnfnfn}}}}} {fn}}}}}} {\\\fn\fn\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fn # {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft} {fnMicrosoft Sans Serif} {1}{E_{y}} {frac} {fnK} {fnK}} {fnK}} {fnK}}} {fn}}} {fn} {fnf}}}}} {fnfn}}}}}} {fnf}}}}}}} {\\\fn\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fn {fnH00} {fnK}} {fnK}} {fnK}}} {fn}} {fn}} {fnfn}}}}}} {fnfnfnfnH00}}}}} {fnf}}} {fnH00}}}}}}}}}}}}}}}} {\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\fnH # {fnK} {fnMicroc} {1}{E_{z} {0}}} {1}{G_{yz}} {0}}}} {0} {0} {0} {0}}}}} {0}} {1}{G_{xz}}} {0}}} {begin{bmatrix}sigmatrix}}} {begin{bmatrix}}sigma ¿Por qué? ¿Por qué? ¿Por qué? ¿Por qué? ¿Qué?

Índice de anisotropía elástica universal
Para comprender el grado de anisotropía de cualquier clase, se formuló un índice de anisotropía elástica universal (AU). Reemplaza la relación Zener, que es adecuada para cristales cúbicos.
Base termodinámica
Las deformaciones lineales de materiales elásticos se pueden aproximar como adiabáticas. En estas condiciones y para procesos cuasiestáticos, la primera ley de la termodinámica para un cuerpo deformado se puede expresar como
δ δ W=δ δ U{displaystyle delta W=delta U}

δ δ W=δ δ Ws+δ δ Wb{displaystyle delta W=delta ¿Qué? ¿Qué?

δ δ Ws=∫ ∫ ∂ ∂ Ω Ω t⋅ ⋅ δ δ udS;δ δ Wb=∫ ∫ Ω Ω b⋅ ⋅ δ δ udV{displaystyle delta W_{mathrm {s}=int _{partial Omega }mathbf {t} cdot delta mathbf {u} ,dS;qquad delta ¿Qué? Omega cdot delta mathbf {u} ,dV}

δ δ W=δ δ U=∫ ∫ ∂ ∂ Ω Ω ()n⋅ ⋅ σ σ )⋅ ⋅ δ δ udS+∫ ∫ Ω Ω b⋅ ⋅ δ δ udV.{displaystyle delta W=delta U=int _{partial Omega }(mathbf {n} cdot {boldsymbol {sigma }})cdot delta mathbf {u} ,dS+int _{ Omega cdot delta mathbf {u} ,dV,}

δ δ U=∫ ∫ Ω Ω ()Silencio Silencio ⋅ ⋅ ()σ σ ⋅ ⋅ δ δ u)+b⋅ ⋅ δ δ u)dV.{displaystyle delta U=int ¿Por qué? cdot delta mathbf {u}big)},dV,}

Silencio Silencio ⋅ ⋅ ()a⋅ ⋅ b)=()Silencio Silencio ⋅ ⋅ a)⋅ ⋅ b+12()aT:Silencio Silencio b+a:()Silencio Silencio b)T){displaystyle nabla cdot (mathbf {a} cdot mathbf {b}=(nabla cdot mathbf {a})cdot mathbf {b} +{tfrac {1} {2}left(mathbf {a} - ¿Qué?

δ δ U=∫ ∫ Ω Ω ()σ σ :12()Silencio Silencio δ δ u+()Silencio Silencio δ δ u)T)+()Silencio Silencio ⋅ ⋅ σ σ +b)⋅ ⋅ δ δ u)dV.{displaystyle delta U=int ################################################################################################################################################################################################################################################################ }:{tfrac {1}{2}}left(nabla delta mathbf {u} +(nabla delta mathbf {u})^{mathsf {T}right)+left(nabla cdot {boldsymbol {sigma }+mathbf {b} right)cdot delta mathbf {u} right),dV,.}

δ δ ε ε =12()Silencio Silencio δ δ u+()Silencio Silencio δ δ u)T);Silencio Silencio ⋅ ⋅ σ σ +b=0.{displaystyle delta {boldsymbol {varepsilon }={tfrac {1}{2}}left(nabla delta mathbf {u} +(nabla delta mathbf {u})^{mathsf {T}right),;qquad nabla cdot {boldsymbol {sigmama }+ mathbf {b} = 'mathbf {0} ,

δ δ U=∫ ∫ Ω Ω σ σ :δ δ ε ε dV{displaystyle delta U=int ################################################################################################################################################################################################################################################################ {sigma}:delta {bedsymbol {varepsilon},dV}

δ δ U0=σ σ :δ δ ε ε .{displaystyle delta U_{0}={boldsymbol {sigma }delta {boldsymbol {varepsilon },}

δ δ U0=∂ ∂ U0∂ ∂ ε ε :δ δ ε ε .{displaystyle delta U_{0}={frac {partial ¿Qué? }}}delta {boldsymbol {varepsilon },}

σ σ =∂ ∂ U0∂ ∂ ε ε .{displaystyle {boldsymbol {sigma }={frac {partial ¿Qué? - Sí.

σ σ =c:ε ε {displaystyle {boldsymbol {sigma }={mathsf {c}:{boldsymbol {varepsilon}}

∂ ∂ ∂ ∂ ε ε σ σ ()ε ε )=constante=c.{fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {\fnMicrosoft} ##{partial {boldsymbol {varepsilon ♪♪♪♪♪ {sigma}={mthsf {c},}

∂ ∂ σ σ ij∂ ∂ ε ε kl=constante=cijkl.{displaystyle {frac {partial sigma {}{}{partial varepsilon ¿Qué?

Más resultados...







