
Función de error
En matemáticas, la función de error (también llamada función de error de Gauss), a menudo denotada por erf, es una función compleja de una variable compleja definida como:
- er z=2π π ∫ ∫ 0ze− − t2dt.{displaystyle operatorname {erf} z={frac {2}{sqrt {pi}}int} {fn}} {fn}} {fn}} {fn}} {fn}}}} {fn}}} {fn}}} {fn}}}} {f}}}} {f}}}}} {f}}}}}}} { ¿Qué?

Algunos autores definen er{displaystyle operatorname {erf} sin el factor de 2/π π {displaystyle 2/{sqrt {fnfnfnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {f}fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft}fnMicrosoft}fnMicrosoft}fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft}fnMicrosoft}f}fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft}f}fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft {fnMicrosoft}f}f}fnMicrosoft {fnMicro }. Esta integral es una función sigmoide especial (no elemental) que ocurre a menudo en probabilidad, estadísticas y ecuaciones diferenciales parciales. En muchas de estas aplicaciones, el argumento de la función es un número real. Si el argumento de la función es real, entonces el valor de la función también es real.


En estadística, para valores no negativos de x, la función de error tiene la siguiente interpretación: para una variable aleatoria Y que se distribuye normalmente con media 0 y desviación estándar 1/√ 2, erf x es la probabilidad de que Y caiga en el rango [−x, x].
Dos funciones estrechamente relacionadas son la función de error complementaria (erfc) definida como
- erfc z=1− − er z,{displaystyle operatorname {erfc} z=1-operatorname {erf} z,}

y la función de error imaginario (erfi) definida como
- erfi z=− − ier iz,{displaystyle operatorname {erfi} z=-ioperatorname {erf} iz,}

donde i es la unidad imaginaria.
Nombre
El nombre "función de error" y su abreviatura erf fueron propuestos por J. W. L. Glaisher en 1871 debido a su conexión con "la teoría de la probabilidad, y en particular la teoría de los errores." El complemento de la función de error también fue discutido por Glaisher en una publicación separada en el mismo año. Por la "ley de facilidad" de errores cuya densidad viene dada por
- f()x)=()cπ π )12e− − cx2{displaystyle f(x)=left({frac}{pi}right)^{frac {1} {2}e^{-cx^{2}}

(la distribución normal), Glaisher calcula la probabilidad de un error entre p y q como:
- ()cπ π )12∫ ∫ pqe− − cx2dx=12()er ()qc)− − er ()pc)).{fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f} {fnMicrosoft Sans Serif} {f} {f} {f} {f} {fnMicrosoft Sans Serif} {f} {f}f} {f}f}f}f}f}f}f}f} {f}f}f}f} {f}f}f}f} {f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f} {f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}cH00f}f}f}cH00}f}f}
 Parcela de la función de error Erf(z) en el plano complejo de -2-2i a 2+2i con colores creados con Mathematica 13.1 función ComplexPlot3D
Parcela de la función de error Erf(z) en el plano complejo de -2-2i a 2+2i con colores creados con Mathematica 13.1 función ComplexPlot3D

_in_the_complex_plane_from_-2-2i_to_2%2B2i_with_colors_created_with_Mathematica_13.1_function_ComplexPlot3D.svg)
Aplicaciones
Cuando los resultados de una serie de mediciones se describen mediante una distribución normal con desviación estándar σ y valor esperado 0, entonces erf (a/σ √2) es la probabilidad de que el error de una sola medición se encuentre entre − a y +a, para positivo a. Esto es útil, por ejemplo, para determinar la tasa de error de bit de un sistema de comunicación digital.
Las funciones de error y de error complementarias ocurren, por ejemplo, en soluciones de la ecuación del calor cuando las condiciones de contorno están dadas por la función escalón de Heaviside.
La función de error y sus aproximaciones se pueden usar para estimar resultados que se cumplen con alta o baja probabilidad. Dada una variable aleatoria X ~ Norm[μ,σ] (una distribución normal con media μ y desviación estándar σ) y una constante L < μ:
- Pr[X≤ ≤ L]=12+12er L− − μ μ 2σ σ .. Aexp ()− − B()L− − μ μ σ σ )2){displaystyle {begin{aligned}Pr[Xleq L] {1}{2}}+{frac {1}{2}operatorname {erf} {frac} {L-mu}{sqrt {2}sigma }\\approx Aexpleft(-Bleft({frac Bien.
![{displaystyle {begin{aligned}Pr[Xleq L]&={frac {1}{2}}+{frac {1}{2}}operatorname {erf} {frac {L-mu }{{sqrt {2}}sigma }}\&approx Aexp left(-Bleft({frac {L-mu }{sigma }}right)^{2}right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f3cb760eaf336393db9fd0bb12c4465655a27de8)
donde A y B son ciertas constantes numéricas. Si L está lo suficientemente lejos de la media, específicamente μ − L ≥ σ√ln k, entonces:
- Pr[X≤ ≤ L]≤ ≤ Aexp ()− − BIn k)=AkB{displaystyle Pr[Xleq L]leq Aexp(-Bln {k}={frac {A}{k^{B}}}
![{displaystyle Pr[Xleq L]leq Aexp(-Bln {k})={frac {A}{k^{B}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2baadea015e20a45d1034fd88eed861e7fcce178)
entonces la probabilidad llega a 0 cuando k → ∞.
La probabilidad de que X esté en el intervalo [L a, Lb] se puede derivar como
- Pr[La≤ ≤ X≤ ≤ Lb]=∫ ∫ LaLb12π π σ σ exp ()− − ()x− − μ μ )22σ σ 2)dx=12()er Lb− − μ μ 2σ σ − − er La− − μ μ 2σ σ ).{displaystyle {begin{aligned}Pr[L_{a}leq Xleq L_{b}] ¿Qué? {1}{sqrt {2pi}sigma }exp left(-{frac {(x-mu)}{2sigma ^{2}}derecha),mathrm {d} xmu}={2}}left(operatorname {erf} {c} {c} {c} {c} {c}c} {c}c}c} {c} {c}c}c} {c} {c} {c} {c}c}c}c}c}c}c}c}c}c}c}cc}ccccc}c}cccccccc}c}c}c}c}c}ccc}ccc}ccc}ccc {fnK}sigma ¿Qué? {sqrt {2}sigma}derecha)end{aligned}}}
![{displaystyle {begin{aligned}Pr[L_{a}leq Xleq L_{b}]&=int _{L_{a}}^{L_{b}}{frac {1}{{sqrt {2pi }}sigma }}exp left(-{frac {(x-mu)^{2}}{2sigma ^{2}}}right),mathrm {d} x\&={frac {1}{2}}left(operatorname {erf} {frac {L_{b}-mu }{{sqrt {2}}sigma }}-operatorname {erf} {frac {L_{a}-mu }{{sqrt {2}}sigma }}right).end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd2214f0db2c1d36075815825b616501175c6283)
Propiedades


La propiedad erf (−z) = −erf z significa que la función de error es una función impar. Esto resulta directamente del hecho de que el integrando e−t2 es una función par (la antiderivada de una función par que es cero en el origen es una función impar y viceversa).
Dado que la función de error es una función completa que convierte números reales en números reales, para cualquier número complejo z:
- er z̄ ̄ =er z̄ ̄ {displaystyle operatorname {erf} {fnMicrosoft Sans Serif} {Z}={overline {f}

donde z es el conjugado complejo de z .
El integrando f = exp(−z2) y f = erf z se muestran en el complejo z en las figuras de la derecha con coloración de dominio.
La función de error en +∞ es exactamente 1 (ver integral de Gauss). En el eje real, erf z se aproxima a la unidad en z → +∞ y −1 en z → −∞. En el eje imaginario, tiende a ±i∞.
Serie Taylor
La función de error es una función completa; no tiene singularidades (excepto en el infinito) y su desarrollo de Taylor siempre converge, pero es famoso "[...] por su mala convergencia si x > 1."
La integral definitoria no puede evaluarse en forma cerrada en términos de funciones elementales, sino expandiendo el integrando e−z2 en su serie de Maclaurin e integrando término a término, se obtiene la serie de Maclaurin de la función de error como:
- er z=2π π .. n=0JUEGO JUEGO ()− − 1)nz2n+1n!()2n+1)=2π π ()z− − z33+z510− − z742+z9216− − ⋯ ⋯ ){displaystyle {begin{aligned}operatorname {erf} z ago={frac} {2}{sqrt {pi}}}sum _{n=0}{infty }{frac {(-1)^{n} {2n+1}{n} {n=0}}\[6pt]={c {2}{c}{sqrt {i} {i} {i} {ccH0}}}}}} {cccccH00}}}} {cccccccH00}}}}}} {ccccccccccccccccccH00} {cH00} {cH00}}}}ccccH00}cccccH00}}}ccccH00}ccH00}}}}}}}}}}}}}c }left(z-{frac {fnMicroc} {fnMicroc} {fnK}} {fnMicroc} {fnMicroc} {fnMicroc} {Z^{9}{216}-cdots right)end{aligned}}
![{displaystyle {begin{aligned}operatorname {erf} z&={frac {2}{sqrt {pi }}}sum _{n=0}^{infty }{frac {(-1)^{n}z^{2n+1}}{n!(2n+1)}}\[6pt]&={frac {2}{sqrt {pi }}}left(z-{frac {z^{3}}{3}}+{frac {z^{5}}{10}}-{frac {z^{7}}{42}}+{frac {z^{9}}{216}}-cdots right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c80541f305af070bb0510625c584fe1559a0cd2c)
que se cumple para cada número complejo z. Los términos del denominador son la secuencia A007680 en el OEIS.
Para el cálculo iterativo de la serie anterior, la siguiente formulación alternativa puede ser útil:
- er z=2π π .. n=0JUEGO JUEGO ()z∏ ∏ k=1n− − ()2k− − 1)z2k()2k+1))=2π π .. n=0JUEGO JUEGO z2n+1∏ ∏ k=1n− − z2k{displaystyle {begin{aligned}operatorname {erf} z ago={frac} {2}{sqrt {pi}}sum _{n=0}infty }left(zprod - ¿Qué? {-(2k-1)z^{2} {k(2k+1)}}right)[6pt] quedarse={frac {2}{sqrt {pi }}}sum _{n=0}{infty }{frac}{frac}} {f}}}fn=0} {fn0} {f}f}f}f}f}f}f}fnh00fnh00f}fnh00fnh00fnh00}fnh00fnh00}fnfnh00}fnh00}fnh00}}fnh00}fnh00} {fnh00} {fnh00} {fnh00}fnh00}fnh00}fnh00}fnh00}}fnh00}}fnh00}}}}}fn {Z}{2n+1}prod - ¿Qué? {fnK} {fnMicrosoft} {fnMicrosoft}} {fnMicrosoft}} {fnK}} {fnMicrosoft}}} {fnK}} {fnMicrosoft}}}} {f}}} {fnK}}}} {fnK}}} {f}}}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}} {f}}}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {f}}} {f}}}}} {f}} {f}}}}}}}f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}
![{displaystyle {begin{aligned}operatorname {erf} z&={frac {2}{sqrt {pi }}}sum _{n=0}^{infty }left(zprod _{k=1}^{n}{frac {-(2k-1)z^{2}}{k(2k+1)}}right)\[6pt]&={frac {2}{sqrt {pi }}}sum _{n=0}^{infty }{frac {z}{2n+1}}prod _{k=1}^{n}{frac {-z^{2}}{k}}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dca22e8e7dee0297e87a455249c282c6b92fedcb)
porque −(2k − 1)z2/k(2k + 1) expresa el multiplicador para convertir el k th término en el (k + 1)th término (considerando z como primer término).
La función de error imaginario tiene una serie de Maclaurin muy similar, que es:
- erfi z=2π π .. n=0JUEGO JUEGO z2n+1n!()2n+1)=2π π ()z+z33+z510+z742+z9216+⋯ ⋯ ){displaystyle {begin{aligned}operatorname {erfi} z ago={frac} {2}{sqrt {pi}}sum _{n=0}{infty {2n+1}{n!(2n+1)}[6pt] {fnMicroc} {fnMicroc} {fnMicroc} {fnMicroc} {fnMicroc} {fnMicroc} {Z^{9}{216}+cdots right)end{aligned}}
![{displaystyle {begin{aligned}operatorname {erfi} z&={frac {2}{sqrt {pi }}}sum _{n=0}^{infty }{frac {z^{2n+1}}{n!(2n+1)}}\[6pt]&={frac {2}{sqrt {pi }}}left(z+{frac {z^{3}}{3}}+{frac {z^{5}}{10}}+{frac {z^{7}}{42}}+{frac {z^{9}}{216}}+cdots right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2ff91095cd6825137cc951ec0a786db0b7f68fac)
que se cumple para cada número complejo z.
Derivada e integral
La derivada de la función de error se sigue inmediatamente de su definición:
- ddzer z=2π π e− − z2.{displaystyle {frac {mathrm}{mathrm {}f}operatorname {erf} z={frac {2}{sqrt {cH00} {cH00} {cH00} {cH00} {cH00}} {cH00}} {cH00} {cH00} {cH00}} {cH00}} {cH00}} {cH00}}} {cH00}} {f}}} {cHFF}}}} {f}}} {ccH00}}}}} {f}}}}}}}}}}} {sqsqcccccsqsqsqsqsqcsqsqcsqcsqsqcccH00} {cHccccsqcH00} {cH00} {ccsqcH00} {ccH00} {ccH - Sí.

A partir de esto, la derivada de la función de error imaginario también es inmediata:
- ddzerfi z=2π π ez2.{displaystyle {frac {d}fnK}fnMicroc}fnMicroc {fnK}f}fnMicroc}f}fnMicrosoft} {erfi} z={frac} {2}{sqrt {cH00} {cH00} {cH00} {cH00} {cH00}} {cH00}} {cH00} {cH00} {cH00}} {cH00}} {cH00}} {cH00}}} {cH00}} {f}}} {cHFF}}}} {f}}} {ccH00}}}}} {f}}}}}}}}}}} {sqsqcccccsqsqsqsqsqcsqsqcsqcsqsqcccH00} {cHccccsqcH00} {cH00} {ccsqcH00} {ccH00} {ccH - Sí.

Una antiderivada de la función de error, obtenible por integración por partes, es
- zer z+e− − z2π π .{displaystyle zoperatorname {erf} z+{frac {-e^{-z^{2}{sqrt {pi}}}}

Una antiderivada de la función de error imaginario, también obtenible por integración por partes, es
- zerfi z− − ez2π π .{displaystyle zoperatorname {erfi} z-{frac} {fnK} {fnMicrosoft} {fnMicrosoft}}} {f}}} {f}}} {f}}}} {fn}} {fn}}}}}}} {fnf}}}} {f}}} {f}}}}} {f}}}}}} {f}}}}} {f}}}}}}}}}}}}}}}}}} {f}}}}} {f}}}}}}}} {f}}}}}}} {f}}} {f}}}}}}}}} {f}}}}}}}}} {f}}}}}}}}}}}} {f}}}}} {f}}}}}}}}} {f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}} {pi}}}}

Las derivadas de orden superior están dadas por
- er()k) z=2()− − 1)k− − 1π π Hk− − 1()z)e− − z2=2π π dk− − 1dzk− − 1()e− − z2),k=1,2,...... {displaystyle operatorname {erf} {k)}z={frac {2(-1)^{k-1}{ # ♪♪♪ {fnK} {fnMicroc} {fnK} {fnMicroc {cH} {sqrt {pi} ¿Qué? ^{k-1}{mathrm {d} z^{k-1}}left(e^{-z^{2}right),qquad k=1,2,dots }

donde H son los físicos' Polinomios de Hermite.
Serie Bürmann
Usando Hans Heinrich se obtiene una expansión, que converge más rápidamente para todos los valores reales de x que una expansión de Taylor. Teorema de Bürmann:
- er x=2π π Sgn x⋅ ⋅ 1− − e− − x2()1− − 112()1− − e− − x2)− − 7480()1− − e− − x2)2− − 5896()1− − e− − x2)3− − 787276480()1− − e− − x2)4− − ⋯ ⋯ )=2π π Sgn x⋅ ⋅ 1− − e− − x2()π π 2+.. k=1JUEGO JUEGO cke− − kx2).{displaystyle {begin{aligned}operatorname {erf} x limit={frac} {2}{sqrt {pi}}operatorname {sgn} xcdot {sqrt {1-e^{-x^{2}}}left(1-{frac {2} {c}ccH00}ccH00}cH00}ccH00}c}cc}ccc}ccH00}ccH00}ccH00}cccH00}c}ccH00}ccccH00}ccccc}ccccccc}cccccc}cccccccccccccH00}}ccccccc}cccccc}cccccccccc}cccccccccccc}ccccccc {1-e^{-x^{2}}}left({frac {cHFF} }{2}+sum ¿Qué? }c_{k}e^{-kx^{2}right)end{aligned}}}
![{displaystyle {begin{aligned}operatorname {erf} x&={frac {2}{sqrt {pi }}}operatorname {sgn} xcdot {sqrt {1-e^{-x^{2}}}}left(1-{frac {1}{12}}left(1-e^{-x^{2}}right)-{frac {7}{480}}left(1-e^{-x^{2}}right)^{2}-{frac {5}{896}}left(1-e^{-x^{2}}right)^{3}-{frac {787}{276480}}left(1-e^{-x^{2}}right)^{4}-cdots right)\[10pt]&={frac {2}{sqrt {pi }}}operatorname {sgn} xcdot {sqrt {1-e^{-x^{2}}}}left({frac {sqrt {pi }}{2}}+sum _{k=1}^{infty }c_{k}e^{-kx^{2}}right).end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/164e7f029977edb47c83845b04abfe5b2d28b837)
donde sgn es la función de signo. Manteniendo solo los dos primeros coeficientes y eligiendo c1 = 31/200 y c2 = −341/8000, la aproximación resultante muestra su mayor error relativo en x = ±1,3796, donde es menor que 0,0036127:
- er x.. 2π π Sgn x⋅ ⋅ 1− − e− − x2()π π 2+31200e− − x2− − 3418000e− − 2x2).{displaystyle operatorname {erf} xapprox {frac {2}{sqrt {f}f}fnK}cdot {sqrt {cH00}fn}fn}fn}fn}fn}fn9}fnK}cn}cn}cn}cn}fnKcnKcn}cnKcnKcn}cn}cnKcnKcn}cn}cnKcnKcnKcn}cnKcnKcn}cnKcn}cnKcnKcn}cn}cnKcnKcn}cnKcn}cnKcnKcnKcnKcn}cn}cn}cn}cnKcn}cnKcnKcn}cn}cn {1-e^{-x^{2}}}left({frac {cHFF} }{2}+{frac {31}{8000}e^{-2x^{2}}right).}

Funciones inversas

Dado un número complejo z, no existe un número complejo único w satisfaciendo erf w = z, por lo que una función inversa verdadera sería multivaluada. Sin embargo, para −1 < x < 1, hay un número real único denominado erf−1 x satisfactorio
- er ()er− − 1 x)=x.{displaystyle operatorname {erf} left(operatorname {erf} ^{-1}xright)=x.}

La función de error inverso generalmente se define con el dominio (−1,1), y está restringida a este dominio en muchos sistemas de álgebra computacional. Sin embargo, se puede extender al disco |z| < 1 del plano complejo, utilizando la serie de Maclaurin
- er− − 1 z=.. k=0JUEGO JUEGO ck2k+1()π π 2z)2k+1,{displaystyle operatorname {erf} ^{-1}z=sum _{k=0}{infty }{frac {c_{k}{2k+1}left({frac} {fnK} {fnK}}}}left({frac} {f} {fnK} {fnK}} {fnK}}}} {f}} {c_}}}}}}}}c_}}} {c_p}}}}}}}}}}}c_p}c_pc_pc_pc_pc_pc_pc_pc_pc_pc_pc_pc_pc_p}c_pc_pc_pc_pc_pc_pc_pc_pc_pc_pc_pc_p}c_pc_p}c_pc_p}cccc_pc_}c_pc_ {cHFF} {2}}zright)}{2k+1}

donde c0 = 1 y
- ck=.. m=0k− − 1cmck− − 1− − m()m+1)()2m+1)={}1,1,76,12790,43692520,3480716200,...... }.{displaystyle {begin{aligned}c_{k} ¿Qué? {c_{m}c_{k-1-m}{(m+1)(2m+1)}\\c=left{1,{1,{frac}} {m+1)}}\\\\\cccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccc}}}}}}}}}} {7}{6}},{frac {127}{90}},{frac {4369}{2520}},{frac {34807}{16200}},ldots right}end{aligned}} {f} {fnK} {f}} {fnKf}}}} {f}}}} {f}}}}}}}}f}}}}}}fnfnfnfnf}fnfnfnfnfnfnfnKfnKfnfnfnfnfnfnKfnKfnKfnKfnfnKfnfnKfnfnKfnKfnKfnKfnKfnKfnKfnKfnKfnKf}}fn

Así que tenemos la expansión en serie (los factores comunes se han cancelado de numeradores y denominadores):
- er− − 1 z=π π 2()z+π π 12z3+7π π 2480z5+127π π 340320z7+4369π π 45806080z9+34807π π 5182476800z11+⋯ ⋯ ).{displaystyle operatorname {erf} ^{-1}z={frac {sqrt {pi} }{2}left(z+{frac {pi} ## {2} {480}z^{5}+{frac {127pi ¿Qué? ^{4}{5806080}}z^{9}+{frac {34807pi ^{5}{182476800}}}z^{11}+cdots right).}

(Después de la cancelación, las fracciones del numerador/denominador son entradas OEIS: A092676/OEIS: A092677 en el OEIS; sin cancelación, los términos del numerador se dan en la entrada OEIS: A002067). El valor de la función de error en ±∞ es igual a ±1.
Para |z| < 1, tenemos erf(erf−1 z) = z.
La función inversa de error complementario se define como
- erfc− − 1 ()1− − z)=er− − 1 z.{displaystyle operatorname {erfc} ^{-1}(1-z)=operatorname {erf} ^{-1}z.}

Para x reales, hay un número real único erfi−1 x satisfaciendo erfi(erfi−1 x) = x. La función de error imaginario inverso se define como erfi−1 x.
Para cualquier x real, el método de Newton se puede usar para calcular erfi−1 x, y para −1 ≤ x ≤ 1, la siguiente serie de Maclaurin converge:
- erfi− − 1 z=.. k=0JUEGO JUEGO ()− − 1)kck2k+1()π π 2z)2k+1,{displaystyle operatorname {erfi} ^{-1}z=sum _{k=0}{infty }{frac {(-1)^{k}c_{k}{2k+1}left({frac} {cHFF} {2}}zright)}{2k+1}

donde ck se define como arriba.
Expansión asintótica
Una expansión asintótica útil de la función de error complementaria (y por lo tanto también de la función de error) para grandes x reales es
- erfc x=e− − x2xπ π ()1+.. n=1JUEGO JUEGO ()− − 1)n1⋅ ⋅ 3⋅ ⋅ 5⋯ ⋯ ()2n− − 1)()2x2)n)=e− − x2xπ π .. n=0JUEGO JUEGO ()− − 1)n()2n− − 1)!!()2x2)n,{displaystyle {begin{aligned}operatorname {erfc} xiéndose={frac {cHFF} {cHFF} {cH00}} {cH00}} {cHFF} {cH00}} {cH00}} {ccH00}}} {cH00}} {cH00}}}}} {ccccH00}}} {ccH00}}}}}}}}}}}}} {cccccccH00cH00cH00}}}}}}}}}}} {ccccccH00cccccccccccH00}}}}}}}}}}}}}} {ccccH00ccH00ccH00cH00cH00}}}}}}}}}}}}}}}}}}}}}}} {ccH ♪♪♪♪ {fn}cdot 5cdots (2n-1)}{n}{n}}cdot 3cdot 5cdots (2n-1)}{left(2x^{2}right)n}right)[6pt]}={-x^{2}{x{2}{x{s} {s}{s}}}{s}}{n}}{n}{n}{n}}{n}{n}{n}{n}{n=0}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}{n}}{n} {fn}}sum _{n=0}{infty } {n}{n}{frac {(2n-1)!}{left(2x^{2}right)}}end{aligned}}}}}}}}}}} {fn}}} {fnfn}}}} {f}}}}}} {f}}}}}}}}f}} {f} {f} {f}}}}}} {f} {f}}}}}}}}}}f}}}}} {f}f}}}}}}}}}}}}}}f}}}}}}}f}}f}f} {f}} {f}}}f}}f}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}}f}}}}}}}}}
![{displaystyle {begin{aligned}operatorname {erfc} x&={frac {e^{-x^{2}}}{x{sqrt {pi }}}}left(1+sum _{n=1}^{infty }(-1)^{n}{frac {1cdot 3cdot 5cdots (2n-1)}{left(2x^{2}right)^{n}}}right)\[6pt]&={frac {e^{-x^{2}}}{x{sqrt {pi }}}}sum _{n=0}^{infty }(-1)^{n}{frac {(2n-1)!!}{left(2x^{2}right)^{n}}},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/35a11e2e5b22ca898c74f2e913d276c9ac11124a)
donde (2n − 1)!! es el factorial doble de (2n − 1), que es el producto de todos los números impares hasta (2n − 1). Esta serie diverge para todo finito x, y su significado como expansión asintótica es que para cualquier entero N ≥ 1 uno tiene
- erfc x=e− − x2xπ π .. n=0N− − 1()− − 1)n()2n− − 1)!!()2x2)n+RN()x){displaystyle operatorname {erfc} x={frac {cHFF} {cHFF} {cH00}} {cH00}} {cHFF}} {cH00}}} {cH00}}} {cH00}}}} {cHFF}}}}}} {ccH00}}}} {ccH00}}}}}} {cH00}}}}}}}}}}}}}}}} {m} {m}}}}}}}}}} {m} {m}}}} {m}}} {m}}}}}}}}}}}}}}}}}}} {m}}} {m} {m}}} {m} {sqm}}}}} {m} {m} {m}}}}}}}}}}}}}}} {sqm}}}}}}}}}}}}}}}}} {m}}} {fn}}sum _{n=0} {N-1} {n}{n}{n}{frac {(2n-1)}{left(2x^{2}right)}}+R_{N}(x)}

donde el resto, en notación de Landau, es
- RN()x)=O()x− − ()1+2N)e− − x2){displaystyle R_{N}(x)=Oleft(x^{-(1+2N)}e^{-x^{2}right)}

como x → ∞.
De hecho, el valor exacto del resto es
- RN()x):=()− − 1)Nπ π 21− − 2N()2N)!N!∫ ∫ xJUEGO JUEGO t− − 2Ne− − t2dt,{displaystyle ¿Qué? ¡No!

que sigue fácilmente por inducción, escribiendo
- e− − t2=− − ()2t)− − 1()e− − t2).{displaystyle e^{-t^{2}=-(2t)^{-1}left(e^{-t^{2}right)}

e integrando por partes.
Para valores suficientemente grandes de x, solo se necesitan los primeros términos de esta expansión asintótica para obtener una buena aproximación de erfc x (mientras que para valores no demasiado grandes de x, la expansión de Taylor anterior en 0 proporciona una convergencia muy rápida).
Expansión continua de fracciones
Una expansión en fracción continua de la función de error complementaria es:
- erfc z=zπ π e− − z21z2+a11+a2z2+a31+⋯ ⋯ ,am=m2.{displaystyle operatorname {erfc} z={frac {fnK} {fnMicrosoft} {fnMicrosoft} {f} {fnMicrosoft}} {f} {fnMicrosoft}} {f}} {f}} {f} {f}}} {f}} {f} {f}} {f}f}f}f}}}}}}}} {f}}}}} {f}}}}}}f}}}}}}}}}}}} {f} {f} {f} {f} {f} {f}}}}f}}}}}}}}} {f}}}}} {f} {f}}}} {f} {f}}}}}}f}}}}}f}}}}}}}}}}}}}}}}}}}}}}}}}}}} {f}}}}}}}}}}}}} {1}{2}+{cfrac {a_{1}{1+{cfrac {a_{2}{2}+{cfrac {a_{3}{1+dotsb {}}}}}}}qquad A_{m}={frac {m}{2}.}

Integral de función de error con función de densidad gaussiana
- ∫ ∫ − − JUEGO JUEGO JUEGO JUEGO er ()ax+b)12π π σ σ 2exp ()− − ()x− − μ μ )22σ σ 2)dx=er aμ μ +b1+2a2σ σ 2,a,b,μ μ ,σ σ ▪ ▪ R{fnMicrosoft Sans Serif} {f} {f}f}f}m} {f} {f} {f} {f}f}f}f}f}f}f}m}f}m} {f}m} {f}f}f}f}m}m}m} {f}f}m}m}m}m}m}mm}m} {m}m}f} {m}m}m}m}m}m}f}f}m}m}f}f}mm}f}mm}m}m}f}m}m}m}mmm}f}f}f}m}f}m}m}m}m}m}m}m}m} {fnMicroc {fnMicroc} {1+2a}sigma ^{2}}}qquad a,b,musigma in mathbb {R}

que aparece relacionado con Ng y Geller, fórmula 13 en la sección 4.3 con un cambio de variables.
Serie factorial
La serie factorial inversa:
- erfc z=e− − z2π π z.. n=0JUEGO JUEGO ()− − 1)nQn()z2+1)n̄ ̄ =e− − z2π π z()1− − 121()z2+1)+141()z2+1)()z2+2)− − ⋯ ⋯ ){displaystyle {begin{aligned}operatorname {erfc} z pal={frac {fn}fn} {fnfn}fn} {fnfn} {fn}} {fn} {fn}fn} {fn} {fn} {fn} {fn} {fn}}} {fn}}}} {\fn}}}}}}\\\\\fn}\\\\\\fn}\\\fn}\fnfnfn}fnfn}fn}fn}fnfn}fn}fn}fnfn}fn}fn}fnfn}fnfn}}fn}fn}fn}}fn}}}}fn}}fn}}}}\ccfnfn}}}}}}} {fnMicroc} {fnMicroc {fnMicroc}}}}} {fnMicroc {1} {2} {f} {1} {fnMicroc {2}}}}}} {fnMicroc}} {fnMicroc}}}} {fnMicroc} {f}}}}}}} {f}} {f}}} {f}}}} {f}}}} {f} {f} {f}f}}}}}}}}}}}}}}}}} {f} {f} {f}}}f}}}}}}}}} {f}}}} {f}}}}}}}}\\\\\\f} {f} {f}f}}}}}}}f}}}}}}}}}}}}\f} {f}}}} {1}{4}} {frac {1}{2}+1)(z^{2}+2)}-cdots right)end{aligned}}}

converge para Re(z2) > 0. Aquí
- Qn=def1.. ()12)∫ ∫ 0JUEGO JUEGO τ τ ()τ τ − − 1)⋯ ⋯ ()τ τ − − n+1)τ τ − − 12e− − τ τ dτ τ =.. k=0n()12)k̄ ̄ s()n,k),{displaystyle {begin{aligned}Q_{n} {fnMicroc} {fnMicroc}} {fnMicroc}} {f}} {f}}} {f}}} {fn}}}}} {fn}}}}} {fnMicroc}} {f}}} {f}}}}} {fnf}}}}}} {f} {f}}}}} {f}}}}}} {f}f}}f}}}}}}}}}}}}}} {f} {f}} {f}}}}}}f} {f} {f} {f} {f}} {f} {f} {f}f} {f}f}}}}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}} {1}{2}}int] {0} {fn} {fn} {fnMicrosoft Sans Serif}

zn denota el factorial ascendente y s(n,k) denota un número de Stirling con signo del primer tipo. También existe una representación por una suma infinita que contiene el doble factorial:
- er z=2π π .. n=0JUEGO JUEGO ()− − 2)n()2n− − 1)!!()2n+1)!z2n+1{displaystyle operatorname {erf} z={frac {2}{sqrt {pi}}}sum _{n=0}{infty }{frac {(-2)^{n}(2n-1)}{(2n+1)}}z^{2n+1}}}}}} {2n+1}}}}}}}}} {2n+1}}}}}}}}}} {2}} {}}}}}}}}}}}}} {2n}}}}}}}}} {2n}}}}}}}}}}}}}} {sq}} {sq}} {sq}} {sq} {sq}}}}}} {sq} {sq}} {sq} {sq} {sq} {sq}}}} {sq}}}}}}}}}} {sq}}}}}}}}}}}}}}}}}}}}}}}}} {

Aproximaciones numéricas
Aproximación con funciones elementales
- Abramowitz y Stegun ofrecen varias aproximaciones de precisión variable (ecuaciones 7.1.25–28). Esto permite elegir la aproximación más rápida adecuada para una aplicación dada. Para aumentar la precisión, son:
- er x.. 1− − 1()1+a1x+a2x2+a3x3+a4x4)4,x≥ ≥ 0{displaystyle operatorname {erf} xapprox 1-{frac {1}{left(1+a_{1}x+a_{2}x^{2}+a_{3}x^{3}+a_{4}x^{4}right)}}}qquad xgeqq 0}
Donde a1 = 0,278393, a2 = 0,30389, a3 = 0,000972, a4 = 0,078108
- er x.. 1− − ()a1t+a2t2+a3t3)e− − x2,t=11+px,x≥ ≥ 0{displaystyle operatorname {erf} xapprox 1-left (a_{1}t+a_{2}t^{2}+a_{3}t^{3}right)e^{-x^{2}}quad t={frac {1}{1+px}qquad xgeq 0}
(Máximo error: 2.5×10; 5 -)
Donde p = 0,47047, a1 = 0,3480242, a2 = 0,0958798, a3 = 0,478556
(Máximo error: 3×10−7)er x.. 1− − 1()1+a1x+a2x2+⋯ ⋯ +a6x6)16,x≥ ≥ 0{displaystyle operatorname {erf} xapprox 1-{frac {1}{left(1+a_{1}x+a_{2}x^{2}+cdots ##a_{6}x^{6}right]}qquad xgeq 0}Donde a1 = 0,0705230784, a2 = 0,0422820123, a3 = 0,0092705272, a4 = 0,0001520143, a5 = 0,0002765672, a6 = 0,0000430638
(Máximo error: 1,5×10−7)er x.. 1− − ()a1t+a2t2+⋯ ⋯ +a5t5)e− − x2,t=11+px{displaystyle operatorname {erf} xapprox 1-left (a_{1}t+a_{2}t^{2}+cdots ¿Qué? {1}{1+px}}Donde p = 0,275911, a1 = 0,254829592, a2 = 0,284496736, a3 = 1.421413741, a4 = 1,453152027, a5 = 1.061405429
Todas estas aproximaciones son válidas para x ≥ 0. Para utilizar estas aproximaciones para negativo x, utilizar el hecho de que er x es una función extraña, así que er x = −erfx). - Los límites exponenciales y una aproximación exponencial pura para la función de error complementario son dadas por
- 0\operatorname {erfc} x&approx {tfrac {1}{6}}e^{-x^{2}}+{tfrac {1}{2}}e^{-{frac {4}{3}}x^{2}},&quad x&>0.end{aligned}}}" xmlns="http://www.w3.org/1998/Math/MathML">erfc x≤ ≤ 12e− − 2x2+12e− − x2≤ ≤ e− − x2,x■0erfc x.. 16e− − x2+12e− − 43x2,x■0.{displaystyle {begin{aligned}operatorname {erfc} x pacienteleq {tfrac} {1}{2}e^{-2x^{2}}+{tfrac {1} {2}e^{-x^{2}}leq e^{-x^{2}}, ################################################################################################################################################################################################################################################################ {erfc} x pacienteapprox {tfrac} {1} {6}e^{-x^{2}+{tfrac} {1}{2}e^{-{frac {4} {3}x^{2}}, âquad x consigo0.end{aligned}}
0\operatorname {erfc} x&approx {tfrac {1}{6}}e^{-x^{2}}+{tfrac {1}{2}}e^{-{frac {4}{3}}x^{2}},&quad x&>0.end{aligned}}}" aria-hidden="true" class="mwe-math-fallback-image-inline" src="https://wikimedia.org/api/rest_v1/media/math/render/svg/cf4a1576135546bf49c0f2eb85e8165275aa8d02" style="vertical-align: -3.465ex; margin-bottom: -0.206ex; width:46.282ex; height:8.509ex;"/>
- 0\operatorname {erfc} x&approx {tfrac {1}{6}}e^{-x^{2}}+{tfrac {1}{2}}e^{-{frac {4}{3}}x^{2}},&quad x&>0.end{aligned}}}" xmlns="http://www.w3.org/1998/Math/MathML">erfc x≤ ≤ 12e− − 2x2+12e− − x2≤ ≤ e− − x2,x■0erfc x.. 16e− − x2+12e− − 43x2,x■0.{displaystyle {begin{aligned}operatorname {erfc} x pacienteleq {tfrac} {1}{2}e^{-2x^{2}}+{tfrac {1} {2}e^{-x^{2}}leq e^{-x^{2}}, ################################################################################################################################################################################################################################################################ {erfc} x pacienteapprox {tfrac} {1} {6}e^{-x^{2}+{tfrac} {1}{2}e^{-{frac {4} {3}x^{2}}, âquad x consigo0.end{aligned}}
- Lo anterior se ha generalizado a sumas de N exponenciales con mayor precisión en términos de N así erfc x puede ser exactamente aproximado o atado por 2Q ?()√2x), donde
- Q~ ~ ()x)=.. n=1Nane− − bnx2.{displaystyle {tilde {Q}(x)=sum ¿Qué?
n = 1 que produce una aproximación minimax o ligada a la función Q estrechamente relacionada: Q()x) Q ?()x), Q()x≤ Q ?()x), o Q()x) ≥ Q ?()x) para x ≥ 0. Los coeficientes [an,bn)N
n = 1 para muchas variaciones de las aproximaciones y límites exponenciales hasta N = 25 han sido liberados para abrir el acceso como conjunto de datos completo. - Una aproximación estrecha de la función de error complementario para x (0, mujeres) es dado por Karagiannidis " Lioumpas (2007) que mostró la elección adecuada de parámetros {}A,B} que
- erfc x.. ()1− − e− − Ax)e− − x2Bπ π x.{displaystyle operatorname {erfc} xapprox {frac {left(1-e^{-Ax}right)e^{-x^{2}}{ B{sqrt ♪ - Sí.
- Un límite inferior de un solo plazo es
- 1,}" display="block" xmlns="http://www.w3.org/1998/Math/MathML">erfc x≥ ≥ 2eπ π β β − − 1β β e− − β β x2,x≥ ≥ 0,β β ■1,{displaystyle operatorname {erfc} xgeq {sqrt {frac {2e}{pi} {beta}} {beta {beta} {beta}}e^{-beta x^{2}}}qquad xgeq 0,quad beta #
1,}" aria-hidden="true" class="mwe-math-fallback-image-display" src="https://wikimedia.org/api/rest_v1/media/math/render/svg/ca3a4cad21677fa011b495f5665235d20d8bb0af" style="vertical-align: -2.338ex; width:48.578ex; height:6.676ex;"/>
- Otra aproximación es dada por Sergei Winitzki usando sus "aproximaciones de Padé global":
- er x.. Sgn x⋅ ⋅ 1− − exp ()− − x24π π +ax21+ax2){displaystyle operatorname {erf} xapprox operatorname {sgn} xcdot {sqrt {1-frac {4}{frac {f}{f}{f}{f} {f} {f}} {f}}} {f}f}}} {f}}}f}}f} {f}f}}} ¿Qué?
- a=8()π π − − 3)3π π ()4− − π π ).. 0.140012.{displaystyle a={frac {8(pi -3)}{3pi (4-pi)}approx 0.140012.}
Esta aproximación se puede invertir para obtener una aproximación para la función de error inverso:
- er− − 1 x.. Sgn x⋅ ⋅ ()2π π a+In ()1− − x2)2)2− − In ()1− − x2)a− − ()2π π a+In ()1− − x2)2).{displaystyle operatorname {erf} ^{-1}xapprox operatorname {sgn} xcdot {sqrt {fnK} {fnMicroc {fnMicroc}{fnK} {fnMicrosoft} {fn} {fnMicroc} {fnK} {fnK} {fnK} {f}} {fnMicroc}}} {fnKf}f}fnf}}}} {fnfnf}}fnfnfnfnfnfnfnfnfnfnf}fnfnfnfnfnfnf}fnf}fnfnfnfnfnf}fnh}fnfnfnfnfnfnfnfnH00}}fnfnfnfnfnfnfnfnh}}}}fnH a}+{frac {lnleft(1-x^{2}right)}{2}right)^{2}-{frac {ln left(1-x^{2}right)}}}}-left({fracfrac} {2}{pi a}+{frac {lnleft(1-x^{2}right)}{2}right)}}}}}}}}}} {2} {i} {i} {i}} {i} {i}}} {i} {i}}}}}}}}}}}}} {
- Una aproximación con un error máximo de 1.2×10−7 para cualquier argumento real es:
- <math alttext="{displaystyle operatorname {erf} x={begin{cases}1-tau &xgeq 0\tau -1&xer x={}1− − τ τ x≥ ≥ 0τ τ − − 1x.0{displaystyle operatorname {erf} x={begin{cases}1-tau &xgeq 0\\\\tau -1 limite 0end{cases}}<img alt="{displaystyle operatorname {erf} x={begin{cases}1-tau &xgeq 0\tau -1&x
- τ τ =t⋅ ⋅ exp ()− − x2− − 1.26551223+1.00002368t+0,37409196t2+0,09678418t3− − 0.18628806t4+0,27886807t5− − 1.13520398t6+1.48851587t7− − 0.82215223t8+0.17087277t9){displaystyle {begin{aligned}tau < < > > > > > > > > > > (-x^{2}-1.26551223+1.00002368t+0.37409196t^{2}+0.09678418t^{3}-0.18628806t^{4}right.\clubleft.qquad qquad qquad +0.27886807t^{5}-1.13520398t^{6}+1.48851587t^{7}-0.82215223t^{8}+0.17087277t^{9}right)end{aligned}}
- t=11+12SilencioxSilencio.{displaystyle t={frac {1}{1+{frac {1}{2}Principalmente.}











Tabla de valores
| x | er x | 1 − erf x |
|---|---|---|
| 0 | 0 | 1 |
| 0,02 | 0,022564575 | 0.977435425 |
| 0,04 | 0,045111106 | 0.954888894 |
| 0,06 | 0,067621594 | 0.932378406 |
| 0,08 | 0,090078126 | 0.909921874 |
| 0.1 | 0.112462916 | 0.887537084 |
| 0.2 | 0.222702589 | 0,777297411 |
| 0.3 | 0,328626759 | 0.671373241 |
| 0,4 | 0.428392355 | 0.571607645 |
| 0.5 | 0,520499878 | 0.479500122 |
| 0.6 | 0,603856091 | 0,396143909 |
| 0.7 | 0.677801194 | 0.322198806 |
| 0,8 | 0,722100965 | 0,257899035 |
| 0.9 | 0,769908212 | 0.203091788 |
| 1 | 0.842700793 | 0.157299207 |
| 1.1 | 0.880205070 | 0.119794930 |
| 1.2 | 0.910313978 | 0,089686022 |
| 1.3 | 0.934007945 | 0,065992055 |
| 1.4 | 0.952285120 | 0,047714880 |
| 1,5 | 0.966105146 | 0,033894854 |
| 1.6 | 0.976348383 | 0,023651617 |
| 1.7 | 0.983790459 | 0,016209541 |
| 1.8 | 0.989090502 | 0,010909498 |
| 1.9 | 0.992790429 | 0,007209571 |
| 2 | 0.995322265 | 0,004677735 |
| 2.1 | 0.997020533 | 0,002979467 |
| 2.2 | 0.998137154 | 0,001862846 |
| 2.3 | 0.998856823 | 0,001143177 |
| 2.4 | 0.999311486 | 0,000688514 |
| 2.5 | 0.999593048 | 0,000406952 |
| 3 | 0.999977910 | 0,000022090 |
| 3.5 | 0.999999257 | 0,000000743 |
Funciones relacionadas
Función de error complementaria
La función de error complementaria, denominada erfc, se define como
- erfc x=1− − er x=2π π ∫ ∫ xJUEGO JUEGO e− − t2dt=e− − x2erfcx x,{displaystyle {begin{aligned}operatorname {erfc} x limit=1-operatorname {erf} x[5pt] {2}{sqrt {pi}}int _{x}{infty }e^{-t^{2}\,mathrm {d} t[5pt] limit=e^{-x^{2}operatorname {erfcx} x,end{aligned}}}}}}}}} {c} {c} {c}}}}}}}}} {ccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccccc
 Parcela de la función de error complementaria Erfc(z) en el plano complejo de -2-2i a 2+2i con colores creados con Mathematica 13.1 función ComplexPlot3D
Parcela de la función de error complementaria Erfc(z) en el plano complejo de -2-2i a 2+2i con colores creados con Mathematica 13.1 función ComplexPlot3D
_in_the_complex_plane_from_-2-2i_to_2%2B2i_with_colors_created_with_Mathematica_13.1_function_ComplexPlot3D.svg)
![{displaystyle {begin{aligned}operatorname {erfc} x&=1-operatorname {erf} x\[5pt]&={frac {2}{sqrt {pi }}}int _{x}^{infty }e^{-t^{2}},mathrm {d} t\[5pt]&=e^{-x^{2}}operatorname {erfcx} x,end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4acd0062271e2a19c209a02c8cc33d44a28af7cc)
que también define erfcx, la función de error complementaria escalada (que se puede usar en lugar de erfc para evitar el subdesbordamiento aritmético). Otra forma de erfc x para x ≥ 0 se conoce como La fórmula de Craig, según su descubridor:
- erfc ()x▪ ▪ x≥ ≥ 0)=2π π ∫ ∫ 0π π 2exp ()− − x2pecado2 Silencio Silencio )dSilencio Silencio .{displaystyle operatorname {erfc} (xmid xgeq 0)={frac {2}{pi }}int _{0}frac {pi}}int {2} {fn}fnMicroc {x^{2}sin ^{2}theta}right),mathrm {d}theta.}

Esta expresión solo es válida para valores positivos de x, pero se puede usar junto con erfc x = 2 − erfc(−x) para obtener erfc(x) para valores negativos. Esta forma es ventajosa porque el rango de integración es fijo y finito. Una extensión de esta expresión para el erfc de la suma de dos variables no negativas es la siguiente:
- erfc ()x+Sí.▪ ▪ x,Sí.≥ ≥ 0)=2π π ∫ ∫ 0π π 2exp ()− − x2pecado2 Silencio Silencio − − Sí.2#2 Silencio Silencio )dSilencio Silencio .{displaystyle operatorname {erfc} (x+ymid x,ygeq 0)={frac {2}{pi }}int _{0}{frac {pi } {2}exp left(-{frac {x^{2}{sin ^{2}theta }-{frac {y^{2} {cos ^{2}theta}right),mathrm {d} theta.}

Función de error imaginario
La función de error imaginario, denominada erfi, se define como
_in_the_complex_plane_from_-2-2i_to_2%2B2i_with_colors_created_with_Mathematica_13.1_function_ComplexPlot3D.svg)
- erfi x=− − ier ix=2π π ∫ ∫ 0xet2dt=2π π ex2D()x),{displaystyle {begin{aligned}operatorname {erfi} x limit=-ioperatorname {erf} ix[5pt] {2} {sqrt {pi}}int _{0} {x}e^{2},mathrm {d} t[5pt] âTMa {2}{sqrt {sqrt {pi}e^{x}}}D(x),end{aligned}} {} {}} {c} {c}}}} {c} {c}}}}}}}} {c}}}} {c}}}}}} {c} {c}}}}}} {cccc}}}}}} {ccc}}}}}}}} {c}}}}} {cc}}}}}}}}}} {cccccccccc}}}}}}}}}}}} {ccccccccc}}}}}}}}}}
![{displaystyle {begin{aligned}operatorname {erfi} x&=-ioperatorname {erf} ix\[5pt]&={frac {2}{sqrt {pi }}}int _{0}^{x}e^{t^{2}},mathrm {d} t\[5pt]&={frac {2}{sqrt {pi }}}e^{x^{2}}D(x),end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bfd2dd94cd6d0325224d412f6b5e5ed63ca81d4a)
donde D(x) es la función de Dawson (que se puede usar en lugar de erfi para evitar el desbordamiento aritmético).
A pesar del nombre "función de error imaginario", erfi x es real cuando el estilo x es real.
Cuando la función de error se evalúa para argumentos complejos arbitrarios z, la función de error complejo resultante generalmente se analiza en forma escalada como la función de Faddeeva:
- w()z)=e− − z2erfc ()− − iz)=erfcx ()− − iz).{displaystyle w(z)=e^{-z^{2}operatorname {erfc}(-iz)=operatorname {erfcx} (-iz).}

Función de distribución acumulativa
La función de error es esencialmente idéntica a la función de distribución acumulativa normal estándar, denominada Φ, también llamada norm(x) por algunos lenguajes de software, ya que solo se diferencian por el escalado y la traducción. En efecto,
- CCPR CCPR ()x)=12π π ∫ ∫ − − JUEGO JUEGO xe− − t22dt=12()1+er x2)=12erfc ()− − x2){displaystyle {begin{aligned}Phi (x) {1}{sqrt {2pi}}int _{-infty ♫ {x}e^{tfrac {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif}} {f} {f} {f} {f} {fnMicrosoft} {fnMicrosoft} {f}} {f} {f} {fnMicroc}}} {f}}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f}f} {f}f} {f}f}f}f}f}f}f}f}f}f}ccf} {f}f}f}f} {f}f}f} {f}f}f}f}f}f}f} {f}f} {
 la función de distribución acumulativa normal trazada en el plano complejo
la función de distribución acumulativa normal trazada en el plano complejo

![{displaystyle {begin{aligned}Phi (x)&={frac {1}{sqrt {2pi }}}int _{-infty }^{x}e^{tfrac {-t^{2}}{2}},mathrm {d} t\[6pt]&={frac {1}{2}}left(1+operatorname {erf} {frac {x}{sqrt {2}}}right)\[6pt]&={frac {1}{2}}operatorname {erfc} left(-{frac {x}{sqrt {2}}}right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/89a9e9eaaddcd7a91ade15a41b8d1e272d437559)
o reorganizado para erf y erfc:
- er ()x)=2CCPR CCPR ()x2)− − 1erfc ()x)=2CCPR CCPR ()− − x2)=2()1− − CCPR CCPR ()x2)).{fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {fnMicrosoft Sans Serif} {f}fnMicrosoft Sans Serif} {f} {f}f}f}f}f}fnMicros}f}f}f}f}f}fnMinMinMicros}f}fnMinMinMinMicros}fnMicros}}f}f}f}fnMinMicros}f}fnMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMinMientras que est]fnMinMinMinMientras estaba en el
![{displaystyle {begin{aligned}operatorname {erf} (x)&=2Phi left(x{sqrt {2}}right)-1\[6pt]operatorname {erfc} (x)&=2Phi left(-x{sqrt {2}}right)\&=2left(1-Phi left(x{sqrt {2}}right)right).end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/86c84a4d2d79631fe9996e30f1d6c0da3089bfe2)
En consecuencia, la función de error también está estrechamente relacionada con la función Q, que es la probabilidad de cola de la distribución normal estándar. La función Q se puede expresar en términos de la función de error como
- Q()x)=12− − 12er x2=12erfc x2.{displaystyle {begin{aligned}Q(x) {1}{2}-{frac {2}f}f} {frac} {x}{sqrt {2}}\\fnMic {1}}fc}fc} {frac {fc {x}{sqrt {2}}}}end{aligned}}} {fnK}} {f}} {f}}}}fnKf} {f} {f}f}}}}}}f}}}}}}f}}}f}f}}f}f}f}f}f}f}f}f}}f}fnKf}}f}}}}}}}f}}f}}f}}}}}}}f}fnfnMinMinf}}}}fnf}f}}}}}}}}}}}fnfnKf}}}fnKf}}}}}}}}}}fn

La función inversa de Φ se conoce como función cuantil normal o función probit y puede expresarse en términos de la función de error inversa como
- probit ()p)=CCPR CCPR − − 1()p)=2er− − 1 ()2p− − 1)=− − 2erfc− − 1 ()2p).{displaystyle operatorname {probit}(p)=Phi ^{-1}(p)={sqrt {2}operatorname [erf] ^{-1}(2p-1)=-{sqrt {2}operatorname {erfc} ^{-1}(2p). }

La cdf normal estándar se usa más a menudo en probabilidad y estadística, y la función de error se usa más a menudo en otras ramas de las matemáticas.
La función de error es un caso especial de la función de Mittag-Leffler y también se puede expresar como una función hipergeométrica confluente (función de Kummer):
- er x=2xπ π M()12,32,− − x2).{displaystyle operatorname {erf} x={frac {2x}{sqrt {pi} - Sí. }

Tiene una expresión simple en términos de la integral de Fresnel.
En términos de la función gamma regularizada P y la función gamma incompleta,
- er x=Sgn x⋅ ⋅ P()12,x2)=Sgn xπ π γ γ ()12,x2).{displaystyle operatorname {erf} x=operatorname {sgn} xcdot Pleft({tfrac {1}{2}}},x^{2}right)={frac {operatorname {sgn} x}{sqrt {pi }}}}}gmmaleft {tfrac}{2} {}{}{} {}{}{}{}{}{}{}{}}{}{}{}}}}{}{}{}{}}}}}}}{}}}}}}{}}}}}}}}}{}}}}}{}}}}}{}{}{}}{}}}}}}}{}}}}{}{}{}}}{}}}}}}{}}}}}}}}}}}}}}}}}{}}}}}}}}}{}}}}}}}}}}}}}}} }

sgn x es la función de signo.
Funciones de error generalizado

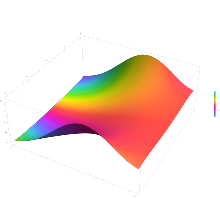
curva gris: E1()x) 1 − e−x/√π
curva roja: E2()x) = erf(x)
curva verde: E3()x)
curva azul: E4()x)
curva de oro: E5()x).
Algunos autores analizan las funciones más generales:
- En()x)=n!π π ∫ ∫ 0xe− − tndt=n!π π .. p=0JUEGO JUEGO ()− − 1)pxnp+1()np+1)p!.{displaystyle E_{n}(x)={frac {n}{sqrt {pi }}int _{0} {x}e^{-t^{n},mathrm {d} {cH00} {cH00}} {cH00} {fnMicroc} {fnK}}sum _{=0}{infty }(-1)}{p}{frac} {x^{np+1}{(np+1)p}}}}

Casos notables son:
- E0()x) es una línea recta a través del origen: E0()x) x/e√π
- E2()x) es la función de error, er x.
Después de la división por n!, todos los En para impares n parecen similares (pero no idénticos) entre sí. Del mismo modo, En incluso para n parecen similares (pero no idénticos) entre sí después de una simple división por n!. Todas las funciones de error generalizadas para n > 0 tienen un aspecto similar en el lado positivo x del gráfico.
Estas funciones generalizadas pueden expresarse de manera equivalente para x > 0 usando la función gamma y la función gamma incompleta:
- 0.}" xmlns="http://www.w3.org/1998/Math/MathML">En()x)=1π π .. ()n)().. ()1n)− − .. ()1n,xn)),x■0.{displaystyle E_{n}(x)={frac {1}{sqrt {cH00} {cH00} {cH00} {cH00} {cH00}} {cH00}} {cH00} {cH00} {fn}} {fn}} {cHFF} {f}} {cH00}} {cH00}}} {f} {f}}}}} {f}}}}}}}}}}} {f} {f} {f} {f}f}}}}}f}f} {f}f}f}f}}}f}f}f}f}f}f}fnf}fnf} {sqf} {fnsqf}f} {fnfnfnfnfnf}fnf}}f}f}}f} {fn }}Gamma (n)left(Gamma left({frac {1}{n}right)-Gamma left({frac {1}{n},x^{n}right)right),qquad x confianza0.}
0.}" aria-hidden="true" class="mwe-math-fallback-image-inline" src="https://wikimedia.org/api/rest_v1/media/math/render/svg/ff23b0f564948d88a81f7846c4869a84640c1115" style="vertical-align: -2.838ex; width:55.45ex; height:6.509ex;"/>
Por lo tanto, podemos definir la función de error en términos de la función gamma incompleta:
- er x=1− − 1π π .. ()12,x2).{displaystyle operatorname {erf} x=1-{frac {1}{sqrt {cH00} {cH00} {cH00} {cH00} {cH00}} {cH00} {cH00}} {cH00} {cH00} {cH00}} {cH00}} {cH00} {cHFF} {cH00}}}}} {cHFF}}} {cHFF}}} {cH00}}} {f}}} {f} {f}}}}}} {ccH}} {cccccccccccccHFF} {cH00}}} {cHFF}} {cccccccccH00}}} {cHFF} {cHFF}cccHFF} {ccH00}}}}}}}} }}Gamma left({tfrac {1}{2},x^{2}right). }

Integrales iteradas de la función de error complementaria
Las integrales iteradas de la función de error complementaria están definidas por
- inerfc z=∫ ∫ zJUEGO JUEGO in− − 1erfc Especificaciones Especificaciones dEspecificaciones Especificaciones i0erfc z=erfc zi1erfc z=ierfc z=1π π e− − z2− − zerfc zi2erfc z=14()erfc z− − 2zierfc z){displaystyle {begin{aligned}operatorname {i} }fn}fnfc} z=int ¿Por qué? {ierfc} z={frac} {1} {sqrt {pi}}e^{-z^{2}-zoperatorname {erfc} z\\\\\\\fcH00}fc}fc}left(operatorname {erfc} z-2zoperatorname {ierfc} zright)\end{aligned}}}}}}}}}}}}}fcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcfcH3fcfcfcH3fcfcfcfcfcfcfcH3fcH3fcH3fcfcH3fcfcH3fcfcH3fcH3fcH3fc}fcH3fcH3fc}fc}
![{displaystyle {begin{aligned}operatorname {i} ^{n}!operatorname {erfc} z&=int _{z}^{infty }operatorname {i} ^{n-1}!operatorname {erfc} zeta ,mathrm {d} zeta \[6pt]operatorname {i} ^{0}!operatorname {erfc} z&=operatorname {erfc} z\operatorname {i} ^{1}!operatorname {erfc} z&=operatorname {ierfc} z={frac {1}{sqrt {pi }}}e^{-z^{2}}-zoperatorname {erfc} z\operatorname {i} ^{2}!operatorname {erfc} z&={tfrac {1}{4}}left(operatorname {erfc} z-2zoperatorname {ierfc} zright)\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c3e7b953efaa4d730a5479bd61a2c378c8f761dc)
La fórmula de recurrencia general es
- 2n⋅ ⋅ inerfc z=in− − 2erfc z− − 2z⋅ ⋅ in− − 1erfc z{displaystyle 2ncdot operatorname {i} ^{n}!operatorname {erfc} z=operatorname {i} ^{n-2}!!operatorname {erfc} z-2zcdot operatorname {i} ^{n-1}!]

Tienen la serie de potencias
- inerfc z=.. j=0JUEGO JUEGO ()− − z)j2n− − jj!.. ()1+n− − j2),{displaystyle operatorname {i} ^{n}!operatorname {erfc} z=sum _{j=0}^{infty }{frac {(-z)}{2^{n-j}j!\, Gamma left(1+{frac {n-j}{2}right)}}}}

de donde se siguen las propiedades de simetría
- i2merfc ()− − z)=− − i2merfc z+.. q=0mz2q22()m− − q)− − 1()2q)!()m− − q)!{displaystyle operatorname {i} ^{2m}!operatorname {erfc}=-operatorname {i} ^{2m}!fnMiembro {erfc} z+sum ¡No!

y
- i2m+1erfc ()− − z)=i2m+1erfc z+.. q=0mz2q+122()m− − q)− − 1()2q+1)!()m− − q)!.{displaystyle operatorname {i} ^{2m+1}! operatorname {erfc} (-z)=operatorname {i} ^{2m+1}!fcfc} {2q+1}{2=m-q)-1}(2q+1)!

Implementaciones
Como función real de un argumento real
- En sistemas operativos compatibles con POSIX, el encabezado
math.hdeclarar y la biblioteca matemáticalibmproporcionará las funcioneserfyerfc(doble precisión) así como sus contrapartes de precisión y precisión ampliadaserff,erflyerfcf,erfcl.
- La Biblioteca Científica GNU proporciona
erf,erfc,log(erf), y funciones de error escaladas.
Como función compleja de un argumento complejo
libcerf, numérico Biblioteca C para funciones complejas de error, proporciona las funciones complejascerf,cerfc,cerfcxy las funciones realeserfi,erfcxcon una precisión aproximada de 13 a 14 dígitos, basada en la función Faddeeva como implementada en el paquete MIT Faddeeva
Contenido relacionado
Funtores adjuntos
Jaime escalante
Prueba de primalidad