
Espacio tridimensional

En geometría, un espacio tridimensional (espacio 3D, espacio tridimensional o, raramente, espacio tridimensional ) es un espacio matemático en el que se requieren tres valores (coordenadas) para determinar la posición de un punto. Lo más común es que sea el espacio euclidiano tridimensional, es decir, el espacio euclidiano de dimensión tres, el que modela el espacio físico. Los espacios tridimensionales más generales se denominan 3-variedades. El término también puede referirse coloquialmente a un subconjunto del espacio, una región tridimensional (o dominio 3D), una figura sólida.
Técnicamente, un tuple de n los números se pueden entender como las coordenadas cartesianas de un lugar en un n-dimensional Espacio euclidiano. El conjunto de estos n-tuples es comúnmente denotado Rn,{displaystyle mathbb {R} ^{n} y se puede identificar al par formado por un n-dimensional Espacio euclidiano y sistema de coordenadas cartesiano. Cuando n = 3, este espacio se llama el tridimensional Espacio euclidiano (o simplemente "espacio euclidiano" cuando el contexto es claro). En la física clásica, sirve como modelo del universo físico, en el que existe toda la materia conocida. Cuando se considera la teoría de la relatividad, se puede considerar un subespacio local del espacio-tiempo. Si bien este espacio sigue siendo la forma más convincente y útil de modelar el mundo como se experimenta, es sólo un ejemplo de una gran variedad de espacios en tres dimensiones llamados 3-manifolds. En este ejemplo clásico, cuando los tres valores se refieren a mediciones en diferentes direcciones (coordinados), se pueden elegir tres direcciones, siempre y cuando estas direcciones no se encuentran en el mismo plano. Además, si estas direcciones son perpendiculares pares, los tres valores son etiquetados a menudo por los términos ancho/pant, altura/de profundidad, y longitud.

Historia
Los libros XI a XIII de los Elementos de Euclides trataban de la geometría tridimensional. El Libro XI desarrolla nociones de ortogonalidad y paralelismo de líneas y planos, y define sólidos, incluidos paralelepípedos, pirámides, prismas, esferas, octaedros, icosaedros y dodecaedros. El libro XII desarrolla nociones de semejanza de sólidos. El Libro XIII describe la construcción de los cinco sólidos platónicos regulares en una esfera.
En el siglo XVII, el espacio tridimensional se describía con coordenadas cartesianas, con el advenimiento de la geometría analítica desarrollada por René Descartes en su obra La Géométrie y Pierre de Fermat en el manuscrito Ad locos planos et solidos isagoge (Introducción a los lugares planos y sólidos), inédito en vida de Fermat. Sin embargo, sólo la obra de Fermat abordaba el espacio tridimensional.
En el siglo XIX, los desarrollos de la geometría del espacio tridimensional llegaron con el desarrollo de las quaterniones de William Rowan Hamilton. De hecho, fue Hamilton quien acuñó los términos escalar y vector, y fueron definidos por primera vez en su marco geométrico para las quaterniones. El espacio tridimensional podría ser descrito por las cuaterniones q=a+ui+vj+wk{displaystyle q=a+ui+vj+wk que había desaparecido componente de escalar, es decir, a=0{displaystyle a=0}. Aunque no fue estudiado explícitamente por Hamilton, esto introdujo indirectamente nociones de base, aquí dadas por los elementos de cuaternión i,j,k{displaystyle i,j,k}, así como el producto de puntos y el producto cruzado, que corresponden a (el negativo de) la parte del escalar y la parte vectorial del producto de dos cuaternones vectoriales.



No fue hasta Josiah Willard Gibbs que estos dos productos se identificaron por derecho propio, y la notación moderna para el producto punto y cruz se introdujo en sus notas didácticas en el aula, que también se encuentran en el libro de texto de 1901 Análisis vectorial escrito por Edwin Bidwell Wilson basado en el libro de Gibbs. conferencias.
También durante el siglo XIX se produjeron avances en el formalismo abstracto de los espacios vectoriales, con el trabajo de Hermann Grassmann y Giuseppe Peano, el último de los cuales dio por primera vez la definición moderna de espacios vectoriales como una estructura algebraica.
En geometría euclidiana
Sistemas de coordenadas
En matemáticas, la geometría analítica (también llamada geometría cartesiana) describe cada punto en el espacio tridimensional mediante tres coordenadas. Se dan tres ejes de coordenadas, cada uno perpendicular a los otros dos en el origen, el punto en el que se cruzan. Generalmente están etiquetados como x, y y z</i. . En relación con estos ejes, la posición de cualquier punto en el espacio tridimensional está dada por un triple ordenado de números reales, cada número da la distancia de ese punto desde el origen medida a lo largo del eje dado, que es igual a la distancia de ese punto del plano determinado por los otros dos ejes.
Otros métodos populares para describir la ubicación de un punto en el espacio tridimensional incluyen coordenadas cilíndricas y coordenadas esféricas, aunque hay un número infinito de métodos posibles. Para obtener más información, consulte Espacio euclidiano.
A continuación se muestran imágenes de los sistemas mencionados anteriormente.
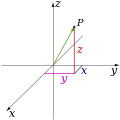 Sistema de coordinación cartesiano
Sistema de coordinación cartesiano Sistema de coordinación cilíndrica
Sistema de coordinación cilíndrica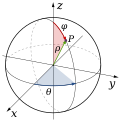 Sistema de coordinación esférica
Sistema de coordinación esférica


.svg)
Rectas y planos
Dos puntos distintos siempre determinan una línea (recta). Tres puntos distintos son colineales o determinan un plano único. Por otro lado, cuatro puntos distintos pueden ser colineales, coplanares o determinar todo el espacio.
Dos líneas distintas pueden cruzarse, ser paralelas o estar sesgadas. Dos líneas paralelas, o dos líneas que se cruzan, se encuentran en un plano único, por lo que las líneas oblicuas son líneas que no se encuentran ni se encuentran en un plano común.
Dos planos distintos pueden encontrarse en una línea común o ser paralelos (es decir, no encontrarse). Tres planos distintos, de los cuales ningún par es paralelo, pueden encontrarse en una línea común, encontrarse en un único punto común o no tener ningún punto en común. En el último caso, las tres líneas de intersección de cada par de planos son mutuamente paralelas.
Una línea puede estar en un plano determinado, intersecar ese plano en un punto único o ser paralela al plano. En el último caso, habrá rectas en el plano paralelas a la recta dada.
Un hiperplano es un subespacio de una dimensión menor que la dimensión del espacio completo. Los hiperplanos de un espacio tridimensional son los subespacios bidimensionales, es decir, los planos. En términos de coordenadas cartesianas, los puntos de un hiperplano satisfacen una única ecuación lineal, por lo que los planos en este espacio tridimensional se describen mediante ecuaciones lineales. Una línea puede describirse mediante un par de ecuaciones lineales independientes, cada una de las cuales representa un plano que tiene esta línea como intersección común.
El teorema de Varignon declara que los puntos intermedios de cualquier cuadrilátero en R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } forman un paralelograma, y por lo tanto son coplanar.

Esferas y bolas

Una esfera en 3 espacios (también llamada 2 esferas porque es un objeto bidimensional) consta del conjunto de todos los puntos en 3 espacios a una distancia fija r desde un punto central P. El sólido encerrado por la esfera se llama bola (o, más precisamente, bola 3).
El volumen de la pelota está dado por


Esta 3 esferas es un ejemplo de una 3 variedades: un espacio que 'mira localmente' como el espacio tridimensional. En términos topológicos precisos, cada punto de la 3-esfera tiene una vecindad que es homeomorfa a un subconjunto abierto del espacio 3-D.
Politopos
En tres dimensiones, hay nueve politopos regulares: los cinco sólidos platónicos convexos y los cuatro poliedros no convexos de Kepler-Poinsot.
| Clase | sólidos platónicos | Kepler-Poinsot polyhedra | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Simmetría | Td | Oh. | Ih | ||||||
| Coxeter group | A3[3,3] | B3[4,3] | H3[5,3] | ||||||
| Orden | 24 | 48 | 120 | ||||||
| Regularpolyhedron | {3,3} |  {4,3} |  {3,4} |  {5,3} | {3,5} |  {5/2,5} |  {5,5/2} | {5/2,3} |  {3,5/2} |
Superficies de revolución
Una superficie generada al hacer girar una curva plana alrededor de una línea fija en su plano como eje se llama superficie de revolución. La curva plana se llama generatriz de la superficie. Una sección de la superficie, hecha al intersectar la superficie con un plano que es perpendicular (ortogonal) al eje, es un círculo.
Los ejemplos simples ocurren cuando la generatriz es una línea. Si la línea generatriz cruza la línea del eje, la superficie de revolución es un cono circular recto con el vértice (ápice) como punto de intersección. Sin embargo, si la generatriz y el eje son paralelos, entonces la superficie de revolución es un cilindro circular.
Superficies cuádricas
En analogía con las secciones cónicas, el conjunto de puntos cuyas coordenadas cartesianas satisfacen la ecuación general de segundo grado, a saber,

Hay seis tipos de superficies cuádricas no degeneradas:
- Ellipsoid
- Hiperboloide de una hoja
- Hiperboloide de dos hojas
- Elliptic cone
- Paraboloide elíptico
- Paraboloide hiperbólico
Las superficies cuádricas degeneradas son el conjunto vacío, un solo punto, una sola recta, un solo plano, un par de planos o un cilindro cuadrático (una superficie que consiste en una sección cónica no degenerada en un plano π y todas las líneas de R3 a través de esa cónica que es normal a π). A veces también se considera que los conos elípticos son superficies cuádricas degeneradas.
Tanto el hiperboloide de una hoja como el paraboloide hiperbólico son superficies regladas, lo que significa que pueden estar formados por una familia de líneas rectas. De hecho, cada uno tiene dos familias de líneas generadoras, los miembros de cada familia están separados y cada miembro de una familia se cruza, con una sola excepción, cada miembro de la otra familia. Cada familia se llama regulus.
En álgebra lineal
Otra forma de ver el espacio tridimensional se encuentra en el álgebra lineal, donde la idea de independencia es crucial. El espacio tiene tres dimensiones porque el largo de una caja es independiente de su ancho o ancho. En el lenguaje técnico del álgebra lineal, el espacio es tridimensional porque cada punto del espacio puede describirse mediante una combinación lineal de tres vectores independientes.
Producto escalar, ángulo y longitud
Un vector se puede imaginar como una flecha. La magnitud del vector es su longitud, y su dirección es la dirección de los puntos de flecha. Un vector en R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } puede ser representado por un triple ordenado de números reales. Estos números se llaman componentes del vector.
El producto escalar de dos vectores A = [A1, A2, A3] y B = [B1, B2, B 3] se define como:
- A⋅ ⋅ B=A1B1+A2B2+A3B3=. . i=13AiBi.{displaystyle mathbf {A} cdot mathbf [B] =A_{1}B_{1}+A_{2}B_{2}+A_{3}B_{3}=sum ¿Qué?

La magnitud de un vector A se denota por ||A| |. El producto escalar de un vector A = [A1, A2, A3] consigo mismo es
- A⋅ ⋅ A=. . A. . 2=A12+A22+A32,{displaystyle mathbf {A} cdot mathbf {A} =fnMitbf {A} {2}+A_{2}}

lo que da
- . . A. . =A⋅ ⋅ A=A12+A22+A32,{displaystylefnMitbf} {fn} cdot mathbf {A}={sqrt {A_{1} {2}+A_{2}} {2}}}

la fórmula para la longitud euclidiana del vector.
Sin referencia a los componentes de los vectores, el producto escalar de dos vectores euclidianos distintos de cero A y B está dado por
- A⋅ ⋅ B=. . A. . . . B. . # Silencio Silencio ,{displaystyle mathbf {A} cdot mathbf {B} = sufrimientomathbf {A} muerte\,fnMitbf {B}cos theta}

donde θ es el ángulo entre A y B.
Producto cruzado
El producto cruzado o producto vectorial es una operación binaria sobre dos vectores en un espacio tridimensional y se denota con el símbolo ×. El producto cruzado A × B de los vectores A y B es un vector que es perpendicular a ambos y por lo tanto normal al plano que los contiene. Tiene muchas aplicaciones en matemáticas, física e ingeniería.
En el lenguaje de función, el producto de la cruz es una función × × :R3× × R3→ → R3{displaystyle times:mathbb {R} {3}times mathbb {R} {3}derecha mathbb {R}.

Los componentes del producto cruzado son A× × B=[A2B3− − B2A3,A3B1− − B3A1,A1B2− − B1A2]{displaystyle mathbf {A} times mathbf {B} =[A_{2}B_{3}-B_{2}A_{3}A_{3}B_{1}-B_{3}A_{1},A_{1}B_{2}-B_{1}A_{2}, y también se puede escribir en componentes, utilizando la convención de sumación de Einstein como ()A× × B)i=ε ε ijkAjBk{displaystyle (mathbf {A} times mathbf {B}_{i}=varepsilon ¿Qué? Donde ε ε ijk{displaystyle varepsilon _{ijk} es el símbolo Levi-Civita. Tiene la propiedad que A× × B=− − B× × A{displaystyle mathbf {A} times mathbf {B} =-mathbf {B} times mathbf {A}.
![{displaystyle mathbf {A} times mathbf {B} =[A_{2}B_{3}-B_{2}A_{3},A_{3}B_{1}-B_{3}A_{1},A_{1}B_{2}-B_{1}A_{2}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a586a3bca8700c41c66803055590a4ff5fd15326)



Su magnitud está relacionada con el ángulo Silencio Silencio {displaystyle theta } entre A{displaystyle mathbf {A} y B{displaystyle mathbf {B} por la identidad




El espacio y el producto forman un álgebra sobre un campo, que no es comunicativo ni asociativo, pero es un álgebra Lie con el producto de la cruz siendo el soporte Lie. Específicamente, el espacio junto con el producto, ()R3,× × ){displaystyle (mathbb {R} ^{3},times)} es isomorfo al álgebra de Lie de rotaciones tridimensionales, denotado so()3){displaystyle {mathfrak}(3)}. Para satisfacer los axiomas de un álgebra de Lie, en lugar de asociatividad el producto cruz satisface la identidad Jacobi. Para cualquier tres vectores A,B{displaystyle mathbf {A}mathbf {B} y C{displaystyle mathbf {C}





Se puede en n dimensiones tomar el producto de n − 1 vectores para producir un vector perpendicular a todos a ellos. Pero si el producto se limita a productos binarios no triviales con resultados vectoriales, existe sólo en tres y siete dimensiones.

Descripción abstracta
Puede ser útil describir el espacio tridimensional como un espacio vectorial tridimensional V{displaystyle V} sobre los números reales. Esto difiere de R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } de una manera sutil. Por definición, existe una base B={}e1,e2,e3}{displaystyle {mathcal {}={e_{1},e_{2},e_{3}}} para V{displaystyle V}. Esto corresponde a un isomorfismo entre V{displaystyle V} y R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} }: la construcción para el isomorfismo se encuentra aquí. Sin embargo, no hay 'preferido' o 'basura canónica' para V{displaystyle V}.


Por otro lado, hay una base preferida para R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} }, que se debe a su descripción como un producto cartesiano de copias de R{displaystyle mathbb {R}, es decir, R3=R× × R× × R{displaystyle mathbb {R} {fn}=Mathbb {R} times mathbb {R} times mathbb {R}. Esto permite la definición de proyecciones canónicas, π π i:R3→ → R{displaystyle pi "Mathbb" {R} {3}derecha mathbb {R}, donde 1≤ ≤ i≤ ≤ 3{displaystyle 1leq ileq 3}. Por ejemplo, π π 1()x1,x2,x3)=x{displaystyle pi _{1}(x_{1},x_{2},x_{3}=x}. Esto permite entonces la definición de la base estándar BEstándar={}E1,E2,E3}{displaystyle {Mathcal {B}_{text{Standard}={E_{1},E_{2},E_{3}}} definidas por









Por lo tanto R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } se puede ver como el espacio vectorial abstracto, junto con la estructura adicional de una elección de base. Por el contrario, V{displaystyle V} se puede obtener a partir de R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } y 'olvidar' la estructura del producto cartesiano, o equivalentemente la elección estándar de la base.
A diferencia de un espacio vectorial general V{displaystyle V}, el espacio R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } a veces se denomina espacio de coordenadas.
Físicamente, es conceptualmente deseable utilizar el formalismo abstracto para asumir la menor estructura posible si no se da por los parámetros de un problema particular. Por ejemplo, en un problema con la simetría rotacional, trabajando con la descripción más concreta del espacio tridimensional R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } asume una elección de base, correspondiente a un conjunto de ejes. Pero en la simetría rotacional, no hay razón por la cual se prefiere decir un conjunto de ejes, el mismo conjunto de ejes que ha sido rota arbitrariamente. De otra manera, una elección preferida de los ejes rompe la simetría rotacional del espacio físico.
Es necesario trabajar con la descripción más concreta. R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} } para hacer cálculos concretos.
Descripción afín
Una descripción más abstracta todavía es modelar el espacio físico como un espacio de afinidad tridimensional E()3){displaystyle E(3)} sobre los números reales. Esto es único hasta el isomorfismo affine. A veces se denomina espacio euclidiano tridimensional. Así como la descripción del espacio vectorial vino de 'olvidar la base preferida' de R3{displaystyle mathbb {R} } {}} {}displaystyle mathbb {R} }, la descripción espacial afine viene de 'olvidar el origen' del espacio vectorial. Espacios euclidianos a veces se llaman Espacios afines de Euclidean para distinguirlos de los espacios vectoriales de Euclidean.

Esto es físicamente atractivo ya que hace manifiesta la invariancia de traducción del espacio físico. Un origen preferido rompe la invariancia traslacional.
Espacio interior del producto
La discusión anterior no involucra el producto escalar. El producto escalar es un ejemplo de producto interno. El espacio físico se puede modelar como un espacio vectorial que además tiene la estructura de un producto interno. El producto interior define nociones de longitud y ángulo (y por tanto, en particular, la noción de ortogonalidad). Para cualquier producto interno, existen bases bajo las cuales el producto interno concuerda con el producto escalar, pero nuevamente, hay muchas bases posibles diferentes, ninguna de las cuales es la preferida. Se diferencian entre sí por una rotación, un elemento del grupo de rotaciones SO(3).
En cálculo
Gradiente, divergencia y curvatura
En un sistema de coordenadas rectangular, el gradiente de una función (diferenciable) f:R3→ → R{displaystyle f:mathbb {R} {3}derecha mathbb {R} es dado por

- Silencio Silencio f=∂ ∂ f∂ ∂ xi+∂ ∂ f∂ ∂ Sí.j+∂ ∂ f∂ ∂ zk{displaystyle nabla f={partial f}{partial x}mathbf {i} - ¿Qué? {fnK}

y en notación de índice está escrito

La divergencia de un campo vectorial (diferenciable) F = U i + V j + W k, es decir, una función F:R3→ → R3{displaystyle mathbf {F}:mathbb {R} {3}derecha mathbb {R}, es igual a la función valorada por el escalar:

- divF=Silencio Silencio ⋅ ⋅ F=∂ ∂ U∂ ∂ x+∂ ∂ V∂ ∂ Sí.+∂ ∂ W∂ ∂ z.{displaystyle operatorname {div} ,mathbf {F} =nabla cdot mathbf {F} ={frac {partial U}{partial ##{frac {partial V}{partial y}}{frac {partial W}{partial }

En notación de índice, con la convención de suma de Einstein esto es

Expandido en coordenadas cartesianas (ver Del en coordenadas cilíndricas y esféricas para representaciones de coordenadas esféricas y cilíndricas), el rizo ∇ × F está, para F, compuesto por [Fx, Fy, Fz] :
- Silencioijk∂ ∂ ∂ ∂ x∂ ∂ ∂ ∂ Sí.∂ ∂ ∂ ∂ zFxFSí.FzSilencio{displaystyle {begin{vmatrix}mathbf {i} > Mathbf {j} > Mathbf {k} {\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\cH\\\\\\\\\\\\\\\\\\\\\cH\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\ }\\\\F_{x} {y} {f}}end{vmatrix}}}

donde i, j y k son los vectores unitarios para x-, ejes y y z, respectivamente. Esto se expande de la siguiente manera:
- ()∂ ∂ Fz∂ ∂ Sí.− − ∂ ∂ FSí.∂ ∂ z)i+()∂ ∂ Fx∂ ∂ z− − ∂ ∂ Fz∂ ∂ x)j+()∂ ∂ FSí.∂ ∂ x− − ∂ ∂ Fx∂ ∂ Sí.)k.{displaystyle left({frac {partial F_{z}{partial Y... ¿Por qué? +left({frac {partial F_{x}{partial ¿Qué? ¿Por qué? F_{y}{partial ¿Qué?

En notación de índice, con la convención de suma de Einstein esto es


Integrales de línea, superficie y volumen
Para algún campo escalar f: U ⊆ Rn → R, la integral de línea a lo largo de una curva suave por tramos C ⊂ U se define como
- ∫ ∫ Cfds=∫ ∫ abf()r()t))Silencior.()t)Silenciodt.{displaystyle int limits _{C}f,ds=int _{a} {b}f(mathbf {r}(t) sostenimientomathbf {r} '(t) soberbio,dt.}

Donde r: [a, b] → C es una parametrización bijeactiva arbitraria de la curva C tales que r()a) y r()b) dar los puntos finales de C y <math alttext="{displaystyle aac)b{displaystyle a meantb}<img alt="{displaystyle a.
Para un campo vectorial F: U ⊆ Rn → Rn, la integral de línea a lo largo de una curva suave por tramos C ⊂ U, en la dirección de r, se define como
- ∫ ∫ CF()r)⋅ ⋅ dr=∫ ∫ abF()r()t))⋅ ⋅ r.()t)dt.{displaystyle int limits ¿Por qué? {F} (mathbf {r} (t))cdot mathbf {r} '(t),dt.}

donde · es el producto escalar y r: [a, b] → C es una parametrización biyectiva de la curva C tal que r(a) y r(b) dan los puntos finales de C.
Una integral de superficie es una generalización de integrales múltiples para la integración sobre superficies. Puede considerarse como la integral doble análoga de la integral de línea. Para encontrar una fórmula explícita para la integral de superficie, necesitamos parametrizar la superficie de interés, S, considerando un sistema de coordenadas curvilíneas en S, como la latitud y la longitud. sobre una esfera. Sea dicha parametrización x(s, t), donde (s, t) varía en alguna región T del plano. Entonces, la integral de superficie está dada por
- ∫ ∫ SfdS=∫ ∫ Tf()x()s,t)).∂ ∂ x∂ ∂ s× × ∂ ∂ x∂ ∂ t.dsdt{displaystyle iint _{S}f,mathrm {d} S=iint _{T}f(mathbf {x} (s,t)left{partial mathbf {x} over partial s} {times {partial mathbf {x} over partial t} {m}

donde la expresión entre barras del lado derecho es la magnitud del producto cruzado de las derivadas parciales de x(s, t), y se conoce como elemento de superficie. Dado un campo vectorial v en S, esa es una función que asigna a cada x en S un vector v(x), la integral de superficie se puede definir componente a componente de acuerdo con la definición de la integral de superficie de un campo escalar; el resultado es un vector.
A volumen integral es una integral sobre una dominio tridimensional o región. Cuando el integrado es trivial (unidad), el volumen integral es simplemente la región volumen. También puede significar una triple integral dentro de una región D dentro R3 de una función f()x,Sí.,z),{displaystyle f(x,y,z),} y generalmente se escribe como:

- ∫ ∫ Df()x,Sí.,z)dxdSí.dz.{displaystyle iiint limits _{D}f(x,y,z),dx,dy,dz.}

Teorema fundamental de las integrales de línea
El teorema fundamental de las integrales de línea dice que una integral de línea a través de un campo gradiente se puede evaluar evaluando el campo escalar original en los puntos finales de la curva.
Vamos. φ φ :U⊆ ⊆ Rn→ → R{displaystyle varphi:Usubseteq mathbb {R} ^{n}to mathbb {R}. Entonces...

- φ φ ()q)− − φ φ ()p)=∫ ∫ γ γ [p,q]Silencio Silencio φ φ ()r)⋅ ⋅ dr.{displaystyle varphi left(mathbf {q} right)-varphi left(mathbf {p} right)=int _{gamma [mathbf {p},mathbf {q}nabla varphi (mathbf {r})cdot dmathbf {r}.
![{displaystyle varphi left(mathbf {q} right)-varphi left(mathbf {p} right)=int _{gamma [mathbf {p},mathbf {q} ]}nabla varphi (mathbf {r})cdot dmathbf {r}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b27cdd0377931a70cbb0635e37781a42e7fe33f9)
Stokes' teorema
Stokes' El teorema relaciona la integral de superficie del rizo de un campo vectorial F sobre una superficie Σ en el espacio tridimensional euclidiano con la integral de línea del campo vectorial sobre su límite ∂Σ:
- ∫ ∫ . . Silencio Silencio × × F⋅ ⋅ d. . =∮ ∮ ∂ ∂ . . F⋅ ⋅ dr.{displaystyle iint _{ Sigma }nabla times mathbf {F} cdot mathrm {d} mathbf {Sigma } =oint _{partial Sigma }mathbf {F} cdot mathrm {d} mathbf {r}.}

Teorema de la divergencia
Suppose V es un subconjunto de Rn{displaystyle mathbb {R} {} {}} {fn}} (en el caso de n = 3, V representa un volumen en espacio 3D) que es compacto y tiene un borde liso S (también indicado con ∂V = S). Si F es un campo vectorial continuamente diferenciable definido en un barrio V, entonces el teorema de divergencia dice:

- ∫ ∫ V()Silencio Silencio ⋅ ⋅ F)dV={displaystyle iiint _{V}left(mathbf {nabla } cdot mathbf {F} right),dV=}
 S{displaystyle scriptstyle S} ()F⋅ ⋅ n)dS.{displaystyle (mathbf {F} cdot mathbf {n},dS.}
S{displaystyle scriptstyle S} ()F⋅ ⋅ n)dS.{displaystyle (mathbf {F} cdot mathbf {n},dS.}



El lado izquierdo es una integral de volumen sobre el volumen V, el lado derecho es la integral de superficie sobre el límite del volumen V. La variedad cerrada ∂V es generalmente el límite de V está orientada por normales que apuntan hacia afuera, y n es el campo normal unitario que apunta hacia afuera del límite ∂V. (dS puede usarse como abreviatura de ndS.)
En topología
El espacio tridimensional tiene una serie de propiedades topológicas que lo distinguen de espacios de otros números de dimensión. Por ejemplo, se requieren al menos tres dimensiones para hacer un nudo en un trozo de cuerda.
En la geometría diferencial los espacios genéricos tridimensionales son 3-manifolds, que se asemejan localmente R3{displaystyle {Mathbb {R} } {3}.

En geometría finita
Muchas ideas de dimensión se pueden probar con geometría finita. El ejemplo más simple es PG(3,2), que tiene planos de Fano como subespacios bidimensionales. Es un ejemplo de geometría de Galois, un estudio de geometría proyectiva utilizando campos finitos. Por tanto, para cualquier campo de Galois GF(q), existe un espacio proyectivo PG(3,q) de tres dimensiones. Por ejemplo, tres líneas sesgadas cualesquiera en PG(3,q) están contenidas exactamente en un regulus.