
Diagrama de Bode


En ingeniería eléctrica y teoría de control, un diagrama de Bode es un gráfico de la respuesta de frecuencia de un sistema. Por lo general, es una combinación de un gráfico de magnitud de Bode, que expresa la magnitud (generalmente en decibelios) de la respuesta de frecuencia, y un gráfico de fase de Bode, que expresa el cambio de fase.
Como lo concibió originalmente Hendrik Wade Bode en la década de 1930, el gráfico es una aproximación asintótica de la respuesta de frecuencia, utilizando segmentos de línea recta.
Resumen
Entre sus varias contribuciones importantes a la teoría de circuitos y la teoría de control, el ingeniero Hendrik Wade Bode, mientras trabajaba en Bell Labs en la década de 1930, ideó un método simple pero preciso para graficar diagramas de ganancia y cambio de fase. Estos llevan su nombre, gráfico de ganancia de Bode y gráfico de fase de Bode. "Bode" a menudo se pronuncia BOH-dee aunque la pronunciación holandesa es Bo-duh. ( holandés: [ˈboːdə]).
Bode se enfrentó al problema de diseñar amplificadores estables con retroalimentación para su uso en redes telefónicas. Desarrolló la técnica de diseño gráfico de diagramas de Bode para mostrar el margen de ganancia y el margen de fase necesarios para mantener la estabilidad bajo variaciones en las características del circuito causadas durante la fabricación o durante la operación. Los principios desarrollados se aplicaron a problemas de diseño de servomecanismos y otros sistemas de control de retroalimentación. El diagrama de Bode es un ejemplo de análisis en el dominio de la frecuencia.
Definición
La trama Bode para un sistema lineal, invariante de tiempo con función de transferencia H()s){displaystyle H(s)} ()s{displaystyle s} ser la frecuencia compleja en el dominio Laplace) consiste en una parcela de magnitud y una trama de fase.


El Parcela de magnitud bodeada es el gráfico de la función SilencioH()s=j⋅ ⋅ )Silencio{displaystyle SilencioH(s=jomega) de frecuencia ⋅ ⋅ {displaystyle omega } (con j{displaystyle j} ser la unidad imaginaria). El ⋅ ⋅ {displaystyle omega }-eje de la trama de magnitud es logarítmica y la magnitud se da en decibeles, es decir, un valor para la magnitud SilencioHSilencio{displaystyle TENSIA está trazado en el eje 20log10 SilencioHSilencio{displaystyle 20log _{10}.





El Bode phase plot es el gráfico de la fase, comúnmente expresado en grados, de la función de transferencia arg ()H()s=j⋅ ⋅ )){displaystyle arg left(H(s=jomega)right)} como función de ⋅ ⋅ {displaystyle omega }. La fase está trazada en el mismo logarítmico ⋅ ⋅ {displaystyle omega }-eje como trama de magnitud, pero el valor de la fase se trama en un eje vertical lineal.

Respuesta de frecuencia
Esta sección ilustra que un Diagrama de Bode es una visualización de la respuesta de frecuencia de un sistema.
Considere un sistema lineal, invariante de tiempo con función de transferencia H()s){displaystyle H(s)}. Supongamos que el sistema está sujeto a una entrada sinusoidal con frecuencia ⋅ ⋅ {displaystyle omega },
- u()t)=pecado ()⋅ ⋅ t),{displaystyle u(t)=sin(omega t);}

que se aplica persistentemente, es decir, desde un momento − − JUEGO JUEGO {displaystyle -infty } a un tiempo t{displaystyle t}. La respuesta será de la forma


- Sí.()t)=Sí.0pecado ()⋅ ⋅ t+φ φ ),{displaystyle y(t)=y_{0}sin(omega t+varphi);,}

es decir, también una señal sinusoidal con amplitud Sí.0{displaystyle Y... cambiada en fase con respecto a la entrada por fase φ φ {displaystyle varphi }.


Se puede demostrar que la magnitud de la respuesta es
- Sí.0=SilencioH()j⋅ ⋅ )Silencio{displaystyle Y_{0}= AnteriorH(mathrm {j} omega)
()1)

y que el cambio de fase es
- φ φ =arg H()j⋅ ⋅ ).{displaystyle varphi =arg H(mathrm {j} omega);}
()2)

En el apéndice se proporciona un esquema para la demostración de estas ecuaciones.
En resumen, sujeto a una entrada con frecuencia ⋅ ⋅ {displaystyle omega } el sistema responde a la misma frecuencia con una salida amplificada por un factor SilencioH()j⋅ ⋅ )Silencio{displaystyle SilencioH(mathrm {j} omega) y el cambio de fase arg ()H()j⋅ ⋅ )){displaystyle arg(H(mathrm {j} omega)}. Estas cantidades, por lo tanto, caracterizan la respuesta de frecuencia y se muestran en la trama Bode.


Reglas para el diagrama de Bode hecho a mano
Para muchos problemas prácticos, los diagramas de Bode detallados se pueden aproximar con segmentos de línea recta que son asíntotas de la respuesta precisa. El efecto de cada uno de los términos de una función de transferencia de elementos múltiples se puede aproximar mediante un conjunto de líneas rectas en un diagrama de Bode. Esto permite una solución gráfica de la función de respuesta de frecuencia general. Antes de la disponibilidad generalizada de computadoras digitales, los métodos gráficos se usaban ampliamente para reducir la necesidad de cálculos tediosos; se podría usar una solución gráfica para identificar rangos factibles de parámetros para un nuevo diseño.
La premisa de un diagrama de Bode es que uno puede considerar el logaritmo de una función en la forma:
- f()x)=A∏ ∏ ()x− − cn)an{displaystyle f(x)=Aprod (x-c_{n}{a_{n}}}

como suma de los logaritmos de sus ceros y polos:
- log ()f()x))=log ()A)+.. anlog ()x− − cn).{displaystyle log(f(x)=log(A)+sum a_{n}log(x-c_{n};.}

Esta idea se usa explícitamente en el método para dibujar diagramas de fase. El método para dibujar gráficas de amplitud usa implícitamente esta idea, pero dado que el logaritmo de la amplitud de cada polo o cero siempre comienza en cero y solo tiene un cambio de asíntota (las líneas rectas), el método se puede simplificar.
Gráfica de amplitud de línea recta
Los decibeles de amplificación generalmente se hace utilizando dB=20log10 ()X){displaystyle {text{dB}=20log _{10}(X)} para definir decibeles. Dado una función de transferencia en el formulario

- H()s)=A∏ ∏ ()s− − xn)an()s− − Sí.n)bn{displaystyle H(s)=Aprod {frac {(s-x_{n}}{a_{n}}{(s-y_{n}}}} {b_{n}}}}}} {fn}}} {fn}} {fn}}}}}} {fn}}}

Donde xn{displaystyle x_{n} y Sí.n{displaystyle y_{n} son constantes, s=j⋅ ⋅ {displaystyle s=mathrm {}omega }, 0}" xmlns="http://www.w3.org/1998/Math/MathML">an,bn■0{displaystyle a_{n},b_{n} {}} {fn}} 0" aria-hidden="true" class="mwe-math-fallback-image-inline" src="https://wikimedia.org/api/rest_v1/media/math/render/svg/b6249f620970dc4a293000bfd4dd71ea9b40ac3d" style="vertical-align: -0.671ex; width:9.959ex; height:2.509ex;"/>, y H{displaystyle H. es la función de transferencia:




- A cada valor de s donde ⋅ ⋅ =xn{displaystyle omega =x_{n} (a cero), aumento la pendiente de la línea por 20⋅ ⋅ andB{displaystyle 20cdot a_{n},mathrm {dB} por década.
- A cada valor de s donde ⋅ ⋅ =Sí.n{displaystyle omega =y_{n} (un poste), disminución la pendiente de la línea por 20⋅ ⋅ bndB{displaystyle 20cdot B_{n},mathrm {dB} por década.
- El valor inicial del gráfico depende de los límites. El punto inicial se encuentra poniendo la frecuencia angular inicial ⋅ ⋅ {displaystyle omega } en la función y hallazgo SilencioH()j⋅ ⋅ )Silencio{displaystyle SilencioH(mathrm {j} omega).
- La pendiente inicial de la función en el valor inicial depende del número y el orden de ceros y polos que están en valores inferiores al valor inicial, y se encuentra utilizando las dos primeras reglas.




Para manejar polinomios irreducibles de 2do orden, ax2+bx+c{displaystyle ax^{2}+bx+c} puede, en muchos casos, ser aproximado ()ax+c)2{displaystyle ({sqrt {}x+{sqrt {c}}}{2}}}}.


Tenga en cuenta que los ceros y los polos ocurren cuando ⋅ ⋅ {displaystyle omega } es iguales cierta xn{displaystyle x_{n} o Sí.n{displaystyle y_{n}. Esto se debe a que la función en cuestión es la magnitud H()j⋅ ⋅ ){displaystyle H(mathrm {}omega)}, y ya que es una función compleja, SilencioH()j⋅ ⋅ )Silencio=H⋅ ⋅ HAlternativa Alternativa {displaystyle SilencioH(mathrm {j}omega). Por lo tanto en cualquier lugar donde hay un cero o un polo que implica el término ()s+xn){displaystyle (s+x_{n})}, la magnitud de ese término es ()xn+j⋅ ⋅ )⋅ ⋅ ()xn− − j⋅ ⋅ )=xn2+⋅ ⋅ 2{sqstyle {sqrt {(x_{n}+mathrm {j}omega)cdot (x_{n}-mathrm {j}omega)}={sqrt {x_{n} {2}+omega }}}}.




Gráfica de amplitud corregida
Para corregir un gráfico de amplitud de línea recta:
- En cada cero, ponga un punto 3⋅ ⋅ andB{displaystyle 3cdot a_{n}mathrm {dB} arriba la línea,
- En cada poste, pon un punto 3⋅ ⋅ bndB{displaystyle 3cdot b_{n}mathrm {dB} infra la línea,
- Dibuja una curva suave a través de esos puntos usando las líneas rectas como asintotes (líneas que se aproxima la curva).


Tenga en cuenta que este método de corrección no incorpora cómo manejar valores complejos de xn{displaystyle x_{n} o Sí.n{displaystyle y_{n}. En el caso de un polinomio irreducible, la mejor manera de corregir la parcela es calcular realmente la magnitud de la función de transferencia en el polo o cero correspondiente al polinomio irreducible, y poner ese punto sobre o debajo de la línea en ese polo o cero.
Gráfica de fase en línea recta
Dada una función de transferencia en la misma forma que la anterior:
- H()s)=A∏ ∏ ()s− − xn)an()s− − Sí.n)bn{displaystyle H(s)=Aprod {frac {(s-x_{n}}{a_{n}}{(s-y_{n}}}} {b_{n}}}}}} {fn}}} {fn}} {fn}}}}}} {fn}}}
la idea es dibujar parcelas separadas para cada polo y cero, luego añadirlas. La curva de fase real es dada por − − arctan ()Im[H()s)]Re[H()s)]){displaystyle -arctan left({tfrac {mathrm {Im} {H(s)}{mathrm {Re} [H(s)}}right)}.
![-arctan left({tfrac {{mathrm {Im}}[H(s)]}{{mathrm {Re}}[H(s)]}}right)](https://wikimedia.org/api/rest_v1/media/math/render/svg/67541821bb17adfa48f97d0c120d30b71d9199a8)
Para dibujar el gráfico de fase, para cada polo y cero:
- Si A{displaystyle A} es positivo, línea de inicio (con cero pendiente) a 0∘ ∘ {displaystyle 0^{circ }
- Si A{displaystyle A} es negativo, línea de inicio (con cero pendiente) a − − 180∘ ∘ {displaystyle -180^{circ }
- Si la suma del número de ceros y polos inestables es extraña, añadir 180° a esa base
- A cada uno ⋅ ⋅ =SilencioxnSilencio{displaystyle omega - ¿Qué? (para ceros estables <math alttext="{displaystyle -operatorname {Re} (z)− − Re ()z).0{displaystyle -operatorname {Re} (z) made0}<img alt="{displaystyle -operatorname {Re} (z)), aumento la pendiente 45⋅ ⋅ an{displaystyle 45cdot a_{n} grados por década, comenzando una década antes ⋅ ⋅ =SilencioxnSilencio{displaystyle omega - ¿Qué? (E.g.: SilencioxnSilencio10{textstyle {frac {cHFF} {cHFF})
- A cada uno ⋅ ⋅ =SilencioSí.nSilencio{displaystyle omega - ¿Qué? (para postes estables <math alttext="{displaystyle -operatorname {Re} (p)− − Re ()p).0{displaystyle -operatorname {Re} (p) made0}<img alt="{displaystyle -operatorname {Re} (p)), disminución la pendiente 45⋅ ⋅ bn{displaystyle 45cdot b_{n} grados por década, comenzando una década antes ⋅ ⋅ =SilencioSí.nSilencio{displaystyle omega - ¿Qué? (E.g.: SilencioSí.nSilencio10{textstyle {frac {cHFF} {cHFF})
- "Inestable" (medio plano derecho) polos y ceros (0}" xmlns="http://www.w3.org/1998/Math/MathML">Re ()s)■0{displaystyle operatorname {Re} (s)
0" aria-hidden="true" class="mwe-math-fallback-image-inline" src="https://wikimedia.org/api/rest_v1/media/math/render/svg/ce0992e3b29be0b1bb2feec2e4682f43fe61c38b" style="vertical-align: -0.838ex; width:9.904ex; height:2.843ex;"/>) tienen comportamiento opuesto
- Aplanar la pendiente de nuevo cuando la fase ha cambiado 90⋅ ⋅ an{displaystyle 90cdot a_{n} grados (por cero) o 90⋅ ⋅ bn{displaystyle 90cdot B_{n} grados (para un poste),
- Después de trazar una línea para cada polo o cero, añadir las líneas juntas para obtener la trama de fase final; es decir, la trama de fase final es la superposición de cada trama de fase anterior.











Ejemplo
Para crear un gráfico de línea recta para un filtro de paso bajo de primer orden (un polo), se considera la función de transferencia en términos de frecuencia angular:
- Hlp()j⋅ ⋅ )=11+j⋅ ⋅ ⋅ ⋅ c.{displaystyle H_{mathrm {lp}(mathrm {j} omega)={1 over 1+mathrm {j} {omega over {omega _{mathrm {c} - Sí.

La ecuación anterior es la forma normalizada de la función de transferencia. El diagrama de Bode se muestra en la Figura 1(b) anterior, y la construcción de la aproximación de línea recta se analiza a continuación.
Gráfica de magnitud
La magnitud (en decibeles) de la función de transferencia anterior, (normalizada y convertida a forma de frecuencia angular), dada por la expresión de ganancia decibel AvdB{displaystyle A_{mathrm {vdB}}:

- AvdB=20⋅ ⋅ log SilencioHlp()j⋅ ⋅ )Silencio=20⋅ ⋅ log 1Silencio1+j⋅ ⋅ ⋅ ⋅ cSilencio=− − 20⋅ ⋅ log Silencio1+j⋅ ⋅ ⋅ ⋅ cSilencio=− − 10⋅ ⋅ log ()1+⋅ ⋅ 2⋅ ⋅ c2){displaystyle {begin{aligned}A_{mathrm {vdB} } {=20cdotlog TENH_{mathrm {lp}(mathrm {j} omega) actual\\\\\\cdot log {frac {1}{left perpetua1+mathrm {j} {frac {f} {m}m} {f}m} {f}fc}m}m} {m}m}m}m}m} {m}m}m}m}m}m}m}m}m}m}m}m}m} {m}m}mm}m}fnMicfnMic}m}m} {m}fnKm}fnKfnMinMinMinMinKfnKfnKfnKfnKfnKm}fn }{omega {\fnK}fnK}fnK}\fnK}\\fnK}\fnK}fn}\fnK}\fnK} }{omega {fnMicrom {}}}}derecha '\\cdotcdot log left(1+{frac {omega ^{2}}{omega _{mathrm {C} {}} {fnK}}}fnunció}

Luego trazado versus frecuencia de entrada ⋅ ⋅ {displaystyle omega } en una escala logarítmica, puede ser aproximado por dos líneas y forma la magnitud asintotica (aproximada) Bode plot of the transfer function:
- La primera línea para frecuencias angulares abajo ⋅ ⋅ c{displaystyle omega _{mathrm {c}} es una línea horizontal a 0 dB ya que en frecuencias bajas ⋅ ⋅ ⋅ ⋅ c{displaystyle {omega over {omega _{mathrm {c} } el término es pequeño y puede ser descuidado, haciendo la ecuación de ganancia decibel sobre igual a cero,
- La segunda línea para frecuencias angulares arriba ⋅ ⋅ c{displaystyle omega _{mathrm {c}} es una línea con una pendiente de −20 dB por década ya que en frecuencias altas ⋅ ⋅ ⋅ ⋅ c{displaystyle {omega over {omega _{mathrm {c} } el término domina y la expresión de ganancia decibel arriba simplifica − − 20log ⋅ ⋅ ⋅ ⋅ c{displaystyle -20log {omega over {omega _{mathrm {c} } que es una línea recta con una pendiente − − 20dB{displaystyle -20,mathrm {dB} por década.




Estas dos líneas se encuentran en la esquina de frecuencia. En el gráfico, se puede ver que para frecuencias muy por debajo de la frecuencia de esquina, el circuito tiene una atenuación de 0 dB, que corresponde a una ganancia de banda de paso unitaria, es decir, la amplitud de la salida del filtro es igual a la amplitud de la entrada. Las frecuencias por encima de la frecuencia de esquina se atenúan: cuanto mayor sea la frecuencia, mayor será la atenuación.
Gráfico de fase
El gráfico de Bode de fase se obtiene trazando el ángulo de fase de la función de transferencia dada por
- arg Hlp()j⋅ ⋅ )=− − #− − 1 ⋅ ⋅ ⋅ ⋅ c{displaystyle arg H_{mathrm {lp}(mathrm {j} omega)=-tan ^{-1}{omega over {omega _{mathrm {c} }

versus ⋅ ⋅ {displaystyle omega }, donde ⋅ ⋅ {displaystyle omega } y ⋅ ⋅ c{displaystyle omega _{mathrm {c}} son las frecuencias angulares de entrada y corte respectivamente. Para frecuencias de entrada muy inferiores a la esquina, la relación ⋅ ⋅ ⋅ ⋅ c{displaystyle {omega over {omega _{mathrm {c} } es pequeño y por lo tanto el ángulo de fase está cerca de cero. A medida que la relación aumenta el valor absoluto de la fase aumenta y se convierte en −45 grados cuando ⋅ ⋅ =⋅ ⋅ c{displaystyle omega =omega _{mathrm {c}}. A medida que la relación aumenta para frecuencias de entrada mucho mayor que la frecuencia de la esquina, el ángulo de fase se acerca asintóticamente −90 grados. La escala de frecuencia para la trama de fase es logarítmica.

Trama normalizada
El eje de frecuencia horizontal, tanto en la magnitud como en las tramas de fase, puede ser reemplazado por la relación de frecuencia normalizada (no dimensionada) ⋅ ⋅ ⋅ ⋅ c{displaystyle {omega over {omega _{mathrm {c} }. En tal caso se dice que la trama se normaliza y las unidades de las frecuencias ya no se utilizan ya puesto que todas las frecuencias de entrada se expresan ahora como múltiples de la frecuencia de corte ⋅ ⋅ c{displaystyle omega _{mathrm {c}}.
Un ejemplo con cero y polo
Las figuras 2 a 5 ilustran mejor la construcción de diagramas de Bode. Este ejemplo con un polo y un cero muestra cómo usar la superposición. Para empezar, los componentes se presentan por separado.
La figura 2 muestra el diagrama de magnitud de Bode para un polo cero y de paso bajo, y compara los dos con los diagramas de línea recta de Bode. Los gráficos de línea recta son horizontales hasta la ubicación del polo (cero) y luego descienden (aumentan) a 20 dB/década. La segunda Figura 3 hace lo mismo para la fase. Los diagramas de fase son horizontales hasta un factor de frecuencia de diez por debajo de la ubicación del polo (cero) y luego descienden (aumentan) a 45°/década hasta que la frecuencia es diez veces mayor que la ubicación del polo (cero). Entonces, las gráficas vuelven a ser horizontales a frecuencias más altas en un cambio de fase total final de 90°.
La figura 4 y la figura 5 muestran cómo se realiza la superposición (suma simple) de un gráfico de polo y cero. Los gráficos de línea recta de Bode se comparan nuevamente con los gráficos exactos. El cero se ha movido a una frecuencia más alta que el polo para hacer un ejemplo más interesante. Observe en la Figura 4 que la caída de 20 dB/década del polo es detenida por el aumento de 20 dB/década del cero, lo que da como resultado una gráfica de magnitud horizontal para las frecuencias por encima de la ubicación cero. Observe en la Figura 5 en el diagrama de fase que la aproximación de línea recta es bastante aproximada en la región donde tanto el polo como el cero afectan la fase. Observe también en la Figura 5 que el rango de frecuencias donde la fase cambia en el gráfico de línea recta está limitado a frecuencias un factor de diez por encima y por debajo de la ubicación del polo (cero). Cuando la fase del polo y el cero están presentes, la gráfica de fase en línea recta es horizontal porque la caída de 45°/década del polo es detenida por el aumento superpuesto de 45°/década del cero en el rango limitado de frecuencias. donde ambos son contribuyentes activos a la fase.
- Ejemplo con polo y cero
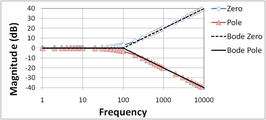
Figura 2: Parcela de magnitud Bode para polo cero y de baja velocidad; curvas etiquetadas "Bode" son las parcelas Bode de línea recta

Figura 3: Parcela de fase de Bode para polo de cero y bajo paso; curvas etiquetadas "Bode" son las parcelas de Bode de línea recta

Figura 4: Parcela de magnitud Bode para la combinación pole-cero; la ubicación del cero es diez veces mayor que en las Figuras 2 y 3; curvas etiquetadas "Bode" son las parcelas de Bode de línea recta
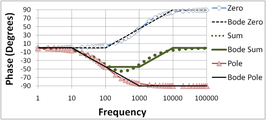
Figura 5: Parcela de fase de bode para la combinación de pole-cero; la ubicación del cero es diez veces mayor que en las Figuras 2 y 3; curvas etiquetadas "Bode" son las parcelas de Bode de línea recta




Margen de ganancia y margen de fase
Los diagramas de Bode se utilizan para evaluar la estabilidad de los amplificadores de retroalimentación negativa al encontrar los márgenes de ganancia y fase de un amplificador. La noción de ganancia y margen de fase se basa en la expresión de ganancia para un amplificador de retroalimentación negativa dada por
- AFB=AOL1+β β AOL,{displaystyle A_{mathrm {FB}={frac {mathrm {OL}{1+beta A_{mathrm {OL}}} {fn}} {fn}}} {fn}} {fnK}}}} {fnK}}}} {fn}}}}}} {fnKf}} {f}}}}}}} {f}}}}}}} {f}}}}}}}}}}}} {f}}}}}} {f}}} {f}}}}}}} {f}}}}}}}}}}}} {\\\\\\\\fn\\fn\\fn\\\\\fn\\\fn\fnfnfnfnfnfn\fnfn\\fn }; }

donde AFB es la ganancia del amplificador con retroalimentación (la ganancia de bucle cerrado), β es el factor de retroalimentación y AOL es la ganancia sin retroalimentación (la ganancia de bucle abierto). La ganancia AOL es una función compleja de la frecuencia, con magnitud y fase. El examen de esta relación muestra la posibilidad de una ganancia infinita (interpretada como inestabilidad) si el producto βAOL = −1. (Es decir, la magnitud de βAOL es la unidad y su fase es −180°, el llamado criterio de estabilidad de Barkhausen). Los diagramas de Bode se utilizan para determinar qué tan cerca llega un amplificador de satisfacer esta condición.
La clave para esta determinación son dos frecuencias. La primera, etiquetada aquí como f180, es la frecuencia donde la ganancia de bucle abierto cambia de signo. El segundo, etiquetado aquí como f0 dB, es la frecuencia donde la magnitud del producto | β AOL | = 1 (en dB, la magnitud 1 es 0 dB). Es decir, la frecuencia f180 está determinada por la condición:
- β β AOL()f180)=− − Silencioβ β AOL()f180)Silencio=− − Silencioβ β AOLSilencio180,{displaystyle beta A_{mathrm {OL}left(f_{180}right)=- sometidabeta A_{mathrm {OL}left(f_{180}right) - ¿Qué?

donde las barras verticales denotan la magnitud de un número complejo (por ejemplo, Silencioa+jbSilencio=[a2+b2]12{displaystyle ← b sufrimiento=left[a^{2}+b^{2}right] {1}{2}}}), y frecuencia f0 dB se determina por la condición:
![|a+{mathrm {j}}b|=left[a^{2}+b^{2}right]^{{{frac 12}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8f9fca916ec587a099995e0427966806c8b4d2e2)
- Silencioβ β AOL()f0dB)Silencio=1.{displaystyle Silenciobeta A_{mathrm {OL}left(f_{mathrm {0dB}right) Silencio=1;

Una medida de proximidad a la inestabilidad es la margen. La trama de fase Bode localiza la frecuencia donde la fase de βAOL alcanza 180−°, denotado aquí como frecuencia f180. Usando esta frecuencia, la trama de magnitud Bode encuentra la magnitud de βAOL. Si presionesAOLSilencio180 ≥ 1, el amplificador es inestable, como se mencionó. Si presionesAOLSilencio180 No se produce inestabilidad, y la separación en dB de la magnitud de tenciónβAOLSilencio180 de la confidencialidadAOLSilencio = 1 se llama margen. Debido a que una magnitud de uno es 0 dB, el margen de ganancia es simplemente una de las formas equivalentes: 20log10 ()Silencioβ β AOLSilencio180)=20log10 ()SilencioAOLSilencio)− − 20log10 ()β β − − 1){displaystyle 20log _{10}(Princebeta A_{mathrm {OL} }vivir_{180}=20log _{10}(beta ^{-1})}.

Otra medida equivalente de proximidad a la inestabilidad es el margen de fase. El diagrama de magnitud de Bode ubica la frecuencia donde la magnitud de |βAOL| alcanza la unidad, indicada aquí como frecuencia f0 dB. Usando esta frecuencia, el diagrama de fase de Bode encuentra la fase de βAOL. Si la fase de βAOL(f0 dB) > −180°, la condición de inestabilidad no se puede cumplir en ninguna frecuencia (porque su magnitud va a ser < 1 cuando f = f180), y la distancia del la fase a f0 dB en grados por encima de −180° se denomina margen de fase.
Si todo lo que se necesita es un simple sí o no sobre el tema de la estabilidad, el amplificador es estable si f0 dB < f180. Este criterio es suficiente para predecir la estabilidad solo para amplificadores que satisfacen algunas restricciones en sus posiciones de polo y cero (sistemas de fase mínima). Aunque estas restricciones normalmente se cumplen, si no lo son se debe utilizar otro método, como el diagrama de Nyquist. Los márgenes de ganancia y fase óptimos se pueden calcular utilizando la teoría de interpolación de Nevanlinna-Pick.
Ejemplos usando diagramas de Bode
Las figuras 6 y 7 ilustran el comportamiento de ganancia y la terminología. Para un amplificador de tres polos, la Figura 6 compara el diagrama de Bode para la ganancia sin retroalimentación (la ganancia de lazo abierto) AOL con la ganancia con retroalimentación AFB (la ganancia de bucle cerrado). Ver amplificador de retroalimentación negativa para más detalles.
En este ejemplo, AOL = 100 dB a bajas frecuencias y 1/β = 58 dB. A bajas frecuencias, AFB ≈ 58 dB también.
Debido a que se grafica la ganancia de lazo abierto AOL y no el producto β AOL, la la condición AOL = 1 / β decide f0 dB. La ganancia de realimentación a bajas frecuencias y para grandes AOL es AFB ≈ 1 / β (observe el fórmula para la ganancia de retroalimentación al principio de esta sección para el caso de una gran ganancia AOL), por lo que una forma equivalente de encontrar f0 dB es mirar dónde la ganancia de retroalimentación se cruza con la ganancia de bucle abierto. (La frecuencia f0 dB se necesita más adelante para encontrar el margen de fase).
Cerca de este cruce de las dos ganancias a f0 dB, los criterios de Barkhausen casi se cumplen en este ejemplo, y el amplificador de retroalimentación exhibe un pico masivo en la ganancia (sería infinito si β AOL = −1). Más allá de la frecuencia de ganancia unitaria f0 dB, la ganancia de bucle abierto es lo suficientemente pequeña como para que AFB ≈ AOL (examinar la fórmula al principio de esta sección para el caso de AOL pequeña).
La Figura 7 muestra la comparación de fase correspondiente: la fase del amplificador de retroalimentación es casi cero a la frecuencia f180 donde la ganancia de bucle abierto tiene una fase de −180°. En esta vecindad, la fase del amplificador de realimentación cae abruptamente hacia abajo para volverse casi igual a la fase del amplificador de lazo abierto. (Recuerde, AFB ≈ AOL para AOL pequeño .)
Al comparar los puntos etiquetados en la Figura 6 y la Figura 7, se ve que la frecuencia de ganancia unitaria f0 dB y la frecuencia de cambio de fase f180 son casi iguales en este amplificador, f180 ≈ f0 dB ≈ 3.332 kHz, lo que significa que el margen de ganancia y el margen de fase son casi cero. El amplificador está en el límite estable.
Las figuras 8 y 9 ilustran el margen de ganancia y el margen de fase para una cantidad diferente de retroalimentación β. El factor de retroalimentación se elige más pequeño que en la Figura 6 o 7, moviendo la condición | β AOL | = 1 a frecuencia más baja. En este ejemplo, 1 / β = 77 dB, y a bajas frecuencias AFB ≈ 77 dB también.
La figura 8 muestra el gráfico de ganancia. De la Figura 8, la intersección de 1 / β y AOL ocurre en f0 dB = 1 kHz. Observe que el pico en la ganancia AFB cerca de f0 dB casi ha desaparecido.
La Figura 9 es el diagrama de fase. Usando el valor de f0 dB = 1 kHz que se encuentra arriba en el gráfico de magnitud de la Figura 8, la fase de bucle abierto en f0 dB es −135°, que es un margen de fase de 45° por encima de −180°.
Usando la Figura 9, para una fase de −180° el valor de f180 = 3.332 kHz (el mismo resultado que se encontró antes, por supuesto). La ganancia de bucle abierto de la Figura 8 en f180 es de 58 dB y 1/β = 77 dB, por lo que el margen de ganancia es de 19 dB.
La estabilidad no es el único criterio para la respuesta del amplificador y, en muchas aplicaciones, una demanda más estricta que la estabilidad es una buena respuesta escalonada. Como regla general, una buena respuesta escalonada requiere un margen de fase de al menos 45° y, a menudo, se recomienda un margen de más de 70°, especialmente cuando la variación de los componentes debido a las tolerancias de fabricación es un problema. Consulte también la discusión sobre el margen de fase en el artículo de respuesta al escalón.
- Ejemplos

Figure 6: Gain of feedback amplificaifier AFB en dB y amplificador de apertura correspondiente AOL. Parámetro 1/β = 58 dB y frecuencias bajas AFB Tómese 58 dB también. El margen de ganancia en este amplificador es casi cero porque Ø βAOLSilencio = 1 ocurre casi f = f180°.

Gráfico 7: Fase del amplificador de retroalimentación °AFB en grados y amplificador de apertura correspondiente °AOL. El margen de fase en este amplificador es casi cero porque el clip de fase se produce en casi la frecuencia de ganancia de unidad f = f0 dB donde Ø βAOLSilencio = 1.
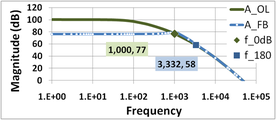
Gráfico 8: Ganancia del amplificador de retroalimentación AFB en dB y amplificador de apertura correspondiente AOL. En este ejemplo, 1 / β = 77 dB. El margen de ganancia en este amplificador es de 19 dB.
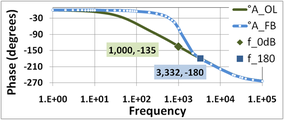
Figure 9: Phase of feedback aplifier AFB en grados y amplificador de apertura correspondiente AOL. El margen de fase en este amplificador es de 45°.




Plotter de Bode

El trazador de Bode es un instrumento electrónico similar a un osciloscopio, que produce un diagrama de Bode, o un gráfico, de la ganancia de voltaje o el cambio de fase de un circuito representado en función de la frecuencia en un sistema de control de retroalimentación o un filtro. Un ejemplo de esto se muestra en la Figura 10. Es extremadamente útil para analizar y probar filtros y la estabilidad de los sistemas de control de retroalimentación, a través de la medición de frecuencias de esquina (corte) y márgenes de ganancia y fase.
Esta función es idéntica a la que realiza un analizador de redes vectoriales, pero el analizador de redes se suele utilizar a frecuencias mucho más altas.
Para fines educativos o de investigación, trazar diagramas de Bode para determinadas funciones de transferencia facilita una mejor comprensión y la obtención de resultados más rápidos (ver enlaces externos).
Parcelas relacionadas
Dos gráficos relacionados que muestran los mismos datos en diferentes sistemas de coordenadas son el gráfico de Nyquist y el gráfico de Nichols. Estos son gráficos paramétricos, con la frecuencia como entrada y la magnitud y fase de la respuesta de frecuencia como salida. El diagrama de Nyquist los muestra en coordenadas polares, con la correlación de magnitud con el radio y la fase con el argumento (ángulo). El diagrama de Nichols los muestra en coordenadas rectangulares, en la escala logarítmica.
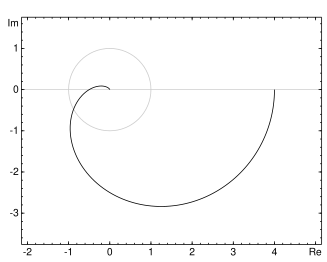
Figura 11: Una parcela de Nyquist.
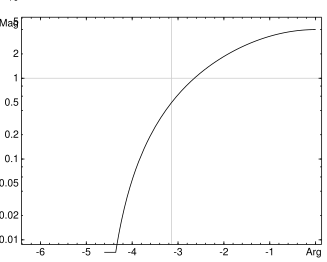
Figure 12: A Nichols plot of the same response from Figure 11.


Contenido relacionado
Ingeniería de usabilidad
Trabajos de mofeta
Túnel de viento