Coordenadas determinadas por distância e ângulo

Pontos no sistema de coordenadas polares com pólo
O e eixo polar
L. Em verde, o ponto com coordenada radial 3 e coordenada angular 60 graus ou (3,
60°). Em azul, o ponto (4,
210°).
Na matemática, o sistema de coordenadas polares é um sistema de coordenadas bidimensional no qual cada ponto em um plano é determinado por uma distância de um ponto de referência e um ângulo de uma direção de referência. O ponto de referência (análogo à origem de um sistema de coordenadas cartesianas) é chamado de pólo, e o raio do pólo na direção de referência é o eixo polar. A distância do polo é chamada de coordenada radial, distância radial ou simplesmente raio, e o ângulo é chamado de coordenada angular, ângulo polar ou azimute. Ângulos em notação polar são geralmente expressos em graus ou radianos (2π rad sendo igual a 360°).
Grégoire de Saint-Vincent e Bonaventura Cavalieri introduziram independentemente os conceitos em meados do século XVII, embora o termo real "coordenadas polares" foi atribuída a Gregorio Fontana no século XVIII. A motivação inicial para a introdução do sistema polar foi o estudo do movimento circular e orbital.
As coordenadas polares são mais apropriadas em qualquer contexto em que o fenômeno considerado esteja inerentemente ligado à direção e ao comprimento de um ponto central em um plano, como espirais. Sistemas físicos planares com corpos se movendo em torno de um ponto central, ou fenômenos originados de um ponto central, são geralmente mais simples e intuitivos de modelar usando coordenadas polares.
O sistema de coordenadas polares é estendido para três dimensões de duas maneiras: os sistemas de coordenadas cilíndricas e esféricas.
História
Os conceitos de ângulo e raio já eram utilizados pelos povos antigos do primeiro milênio aC. O astrônomo e astrólogo grego Hipparchus (190–120 aC) criou uma tabela de funções de corda dando o comprimento da corda para cada ângulo, e há referências ao uso de coordenadas polares para estabelecer posições estelares. Em On Spirals, Arquimedes descreve a espiral arquimediana, uma função cujo raio depende do ângulo. O trabalho grego, no entanto, não se estendia a um sistema de coordenadas completo.
A partir do século VIII dC, os astrônomos desenvolveram métodos para aproximar e calcular a direção de Meca (qibla) — e sua distância — de qualquer local da Terra. A partir do século IX, eles estavam usando trigonometria esférica e métodos de projeção de mapas para determinar essas quantidades com precisão. O cálculo é essencialmente a conversão das coordenadas polares equatoriais de Meca (ou seja, sua longitude e latitude) em suas coordenadas polares (ou seja, sua qibla e distância) em relação a um sistema cujo meridiano de referência é o grande círculo que passa pelo local especificado e a Terra&# 39;s pólos e cujo eixo polar é a linha que passa pelo local e seu ponto antípoda.
Existem vários relatos da introdução de coordenadas polares como parte de um sistema formal de coordenadas. A história completa do assunto é descrita em A Origem das Coordenadas Polares, do professor de Harvard Julian Lowell Coolidge. Grégoire de Saint-Vincent e Bonaventura Cavalieri introduziram os conceitos independentemente em meados do século XVII. Saint-Vincent escreveu sobre eles em particular em 1625 e publicou seu trabalho em 1647, enquanto Cavalieri publicou o seu em 1635 com uma versão corrigida aparecendo em 1653. Cavalieri usou pela primeira vez coordenadas polares para resolver um problema relacionado à área dentro de uma espiral arquimediana. Blaise Pascal posteriormente usou coordenadas polares para calcular o comprimento dos arcos parabólicos.
Em Método de Fluxions (escrito em 1671, publicado em 1736), Sir Isaac Newton examinou as transformações entre coordenadas polares, que ele chamou de "Sétima Maneira; Para Espirais' e nove outros sistemas de coordenadas. Na revista Acta Eruditorum (1691), Jacob Bernoulli usou um sistema com um ponto em uma linha, chamado de polo e eixo polar, respectivamente. As coordenadas foram especificadas pela distância do polo e o ângulo do eixo polar. O trabalho de Bernoulli se estendeu para encontrar o raio de curvatura das curvas expressas nessas coordenadas.
O termo atual coordenadas polares foi atribuído a Gregorio Fontana e foi usado por escritores italianos do século XVIII. O termo apareceu em inglês na tradução de George Peacock de 1816 do Cálculo Diferencial e Integral de Lacroix. Alexis Clairaut foi o primeiro a pensar em coordenadas polares em três dimensões, e Leonhard Euler foi o primeiro a realmente desenvolvê-las.
Convenções

Uma grade polar com vários ângulos, aumentando na orientação anti-horário e rotulado em graus
A coordenada radial geralmente é denotada por r ou ρ, e a coordenada angular por φ, θ ou t. A coordenada angular é especificada como φ pelo padrão ISO 31-11. No entanto, na literatura matemática, o ângulo é frequentemente denotado por θ.
Os ângulos em notação polar são geralmente expressos em graus ou radianos (2π rad sendo igual a 360°). Graus são tradicionalmente usados em navegação, topografia e muitas disciplinas aplicadas, enquanto radianos são mais comuns em matemática e física matemática.
O ângulo φ é definido para começar em 0° a partir de uma direção de referência e aumentar para rotações no sentido horário (cw) ou anti-horário (ccw). Por exemplo, em matemática, a direção de referência é geralmente desenhada como um raio do pólo horizontalmente para a direita, e o ângulo polar aumenta para ângulos positivos para rotações anti-horário, enquanto na navegação (rumo, rumo) o rumo de 0° é desenhado verticalmente para cima e o ângulo aumenta para rotações no sentido horário. Os ângulos polares diminuem para valores negativos para rotações nas respectivas orientações opostas.
Singularidade das coordenadas polares
Adicionar qualquer número de voltas completas (360°) à coordenada angular não altera a direção correspondente. Da mesma forma, qualquer coordenada polar é idêntica à coordenada com o componente radial negativo e a direção oposta (adicionando 180° ao ângulo polar). Portanto, o mesmo ponto (r, φ) pode ser expresso com um número infinito de diferentes coordenadas polares (r, φ + n × 360°) e (−r, φ + 180° + n × 360°) = (−r, φ + (2n + 1) × 180°), onde n é um inteiro arbitrário. Além disso, o próprio pólo pode ser expresso como (0, φ) para qualquer ângulo φ.
Onde uma representação única é necessária para qualquer ponto além do pólo, é comum limitar r a números positivos (r > 0) e φ para o intervalo [0, 360°) ou o intervalo (−180°, 180°], que em radianos são [0, 2π) ou (−π, π]. Outra convenção, em referência ao contradomínio usual da função arctan, é permitir valores reais diferentes de zero arbitrários do componente radial e restringir o ângulo polar a (−90°, 90°]. Em todos os casos, um único azimute para o pólo (r = 0) deve ser escolhido, por exemplo, φ = 0.
Conversão entre coordenadas polares e cartesianas
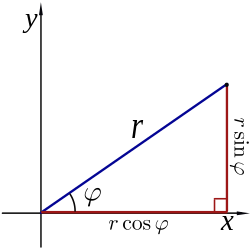
Um diagrama que ilustra a relação entre as coordenadas polares e cartesianas.
As coordenadas polares r e φ podem ser convertidas em coordenadas cartesianas x e y usando o funções trigonométricas seno e cosseno:
x= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Re φ φ ,Sim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Rpecado φ φ .{displaystyle {begin{aligned}x&=rcos varphi\y&=rsin varphi.end{aligned}}}

As coordenadas cartesianas x e y podem ser convertidas em coordenadas polares r e φ com r ≥ 0 e φ no intervalo (−π, π] por:
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =x2+Sim.2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =hipotética (x,Sim.)φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Atan2 (Sim.,x),- Sim. {x^{2}+y^{2}}}=operatorname {hypot} (x,y)\varphi &=operatorname {atan2} (y,x),end{aligned}}}

0\arctan left({frac {y}{x}}right)+pi &{mbox{if }}x<0{mbox{ and }}ygeq 0\arctan left({frac {y}{x}}right)-pi &{mbox{if }}x<0{mbox{ and }}y0\-{frac {pi }{2}}&{mbox{if }}x=0{mbox{ and }}yAtan2 (Sim.,x)= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(arctan (Sim.x)sex>0arctan (Sim.x)+D D sex<0eSim.≥ ≥ 0arctan (Sim.x)- Sim. - Sim. D D sex<0eSim.<0D D 2sex= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0eSim.>0- Sim. - Sim. D D 2sex= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0eSim.<0indefinidosex= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0eSim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0.{displaystyle operatorname {atan2} (y,x)={begin{cases}arctan left({frac {y}{x}}right)&{mbox{if }}x>0\\arctan left({frac {y}{x}}right)+pi &{mbox{if }}x<0{mbox{ e }}ygeq 0\arctan left({frac {y}{x}}right)-pi &{mbox{if }}x<0{mbox{ e }}y0\-{frac }{2}}&{mbox{if }}x=0{mbox{ e }}y<0\{text{undefinida}}&{mbox{if }}x=0{mbox{ e }}y=0.end{cases}}}
![]()
0\arctan left({frac {y}{x}}right)+pi &{mbox{if }}x<0{mbox{ and }}ygeq 0\arctan left({frac {y}{x}}right)-pi &{mbox{if }}x<0{mbox{ and }}y0\-{frac {pi }{2}}&{mbox{if }}x=0{mbox{ and }}y
Se r for calculado primeiro como acima, então esta fórmula para φ pode ser declarada de forma mais simples usando a função arco-cosseno:
<math alttext="{displaystyle varphi ={begin{cases}arccos left({frac {x}{r}}right)&{mbox{if }}ygeq 0{mbox{ and }}rneq 0\-arccos left({frac {x}{r}}right)&{mbox{if }}yφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(Arcos (xR)seSim.≥ ≥ 0eR≠ ≠ 0- Sim. - Sim. Arcos (xR)seSim.<0indefinidoseR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0.{displaystyle varphi ={begin{cases}arccos left({frac {x}{r}}right)&{mbox{if }}ygeq 0{mbox{ and }}rneq 0-arccos left({frac {x}{r}}right)&{mbox{if }}y<0\{text{undefinida}}&{mbox{if }}r=0.end{cases}}}
<img alt="{displaystyle varphi ={begin{cases}arccos left({frac {x}{r}}right)&{mbox{if }}ygeq 0{mbox{ and }}rneq 0\-arccos left({frac {x}{r}}right)&{mbox{if }}y
números complexos
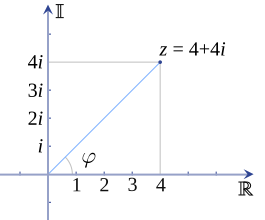
Uma ilustração de um número complexo
zangão. plotado no plano complexo
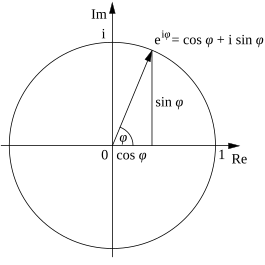
Uma ilustração de um número complexo traçado no plano complexo usando a fórmula de Euler
Todo número complexo pode ser representado como um ponto no plano complexo e, portanto, pode ser expresso especificando as coordenadas cartesianas (chamadas de forma retangular ou cartesiana) ou as coordenadas polares de ponto (s#39; chamado forma polar). O número complexo z pode ser representado em forma retangular como
zangão.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =x+Eu...Sim.- Sim.

zangão.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R(e φ φ +Eu...pecado φ φ ){displaystyle z=r(cos varphi +isin varphi)}

zangão.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =ReEu...φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Rexp Eu...φ φ .{displaystyle z=re^{ivarphi }=rexp ivarphi.}

zangão.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RcEu...S φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R? ? φ φ .{displaystyle z=roperatorname {mathrm {cis} } varphi =rangle varphi.}

Para as operações de multiplicação, divisão, exponenciação e extração de raízes de números complexos, geralmente é muito mais simples trabalhar com números complexos expressos na forma polar do que na forma retangular. Das leis da exponenciação:
- Multiplicação
- R0eEu...φ φ 0R1eEu...φ φ 1= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R0R1eEu...(φ φ 0+φ φ 1)Não. r_{0}e^{ivarphi _{0}},r_{1}e^{ivarphi _{1}}=r_{0}r_{1}e^{ileft(varphi _{0}+varphi _{1}right)}}

- Divisão
- R0eEu...φ φ 0R1eEu...φ φ 1= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R0R1eEu...(φ φ 0- Sim. - Sim. φ φ 1){displaystyle {frac {r_{0}e^{ivarphi _{0}}}{r_{1}e^{ivarphi _{1}}}}={frac {r_{0}}{r_{1}}}e^{i(varphi _{0}-varphi _{1})}}

- Exponentiation (versão de De Moivre)
- (ReEu...φ φ )n= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RneEu...nφ φ {displaystyle left(re^{ivarphi }right)^{n}=r^{n}e^{invarphi)

- Extração de raízes (raiz pulmonar)
- ReEu...φ φ n= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RneEu...φ φ n[{n}]{re^{ivarphi }}}={sqrt[{n}]{r}}e^{ivarphi over n}}
![{displaystyle {sqrt[{n}]{re^{ivarphi }}}={sqrt[{n}]{r}}e^{ivarphi over n}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9702297c60884f24c748553ecc7246eccf95a448)
Equação polar de uma curva

Uma curva no plano cartesiano pode ser mapeada em coordenadas polares. Nesta animação,
Sim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =pecado (6)) x)+2(6!cdot !x)+2}
é mapeado para
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =pecado (6)) θ θ )+2{displaystyle r=sin(6!cdot !theta)+2}
. Clique na imagem para detalhes.
A equação que define uma curva algébrica expressa nas coordenadas polares é conhecida como equação polar . Em muitos casos, essa equação pode ser simplesmente especificada definindo r em função de φ . A curva resultante consiste em pontos da forma ( r ( φ ), φ ) e pode ser considerada como o gráfico da função polar r . Observe que, ao contrário das coordenadas cartesianas, a variável independente φ é a entrada no par ordenado.
Diferentes formas de simetria podem ser deduzidas da equação de uma função polar r :
- Se R(φ) = R(φ) a curva será simétrica sobre o raio horizontal (0°/180°);
- Se R(D - Sim. φ) = R(φ) será simétrico sobre o raio vertical (90 ° / 270°):
- Se R(φ - α) = R(φ) será rotacionalmente simétrica por α no sentido horário e no sentido contrário sobre o pólo.
Devido à natureza circular do sistema de coordenadas polares, muitas curvas podem ser descritas por uma equação polar bastante simples, enquanto sua forma cartesiana é muito mais complicada. Entre as mais conhecidas dessas curvas estão a rosa polar, espiral de Arquimedes, lemniscata, limaçon e cardióide.
Para o círculo, linha e rosa polar abaixo, entende-se que não há restrições no domínio e alcance da curva.
Círculo
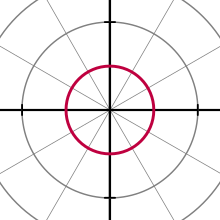
Um círculo com equação
R(φ) = 1A equação geral para um círculo com um centro em (R0,γ γ )(r_{0},gamma)} e raio um o
e raio um o
R2- Sim. - Sim. 2RR0e (φ φ - Sim. - Sim. γ γ )+R02= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =um2.Não. r^{2}-2rr_{0}cos(varphi -gamma)+r_{0}^{2}=a^{2}.}

Isso pode ser simplificado de várias maneiras, para atender a casos mais específicos, como a equação
R(φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =um(varphi)=a}

Quando r0 = a ou a origem está no círculo, o equação torna-se
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =2ume (φ φ - Sim. - Sim. γ γ ).{displaystyle r=2acos(varphi -gamma).}

No caso geral, a equação pode ser resolvida para r, dando
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R0e (φ φ - Sim. - Sim. γ γ )+um2- Sim. - Sim. R02pecado2 (φ φ - Sim. - Sim. γ γ )Não. r=r_{0}cos(varphi -gamma)+{sqrt {a^{2}-r_{0}^{2}sin ^{2}(varphi -gamma)}}}

Linha
As linhas
radiais (aquelas que passam pelo poste) são representadas pela equação
φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =γ γ ,{displaystyle varphi =gamma}

 φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =arctan m{displaystyle varphi =arctan m}
φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =arctan m{displaystyle varphi =arctan m} mNão.
mNão. φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =γ γ {displaystyle varphi =gamma }
φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =γ γ {displaystyle varphi =gamma } (R0,γ γ )(r_{0},gamma)}
(R0,γ γ )(r_{0},gamma)}R(φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R0- Sim. (φ φ - Sim. - Sim. γ γ ).{displaystyle r(varphi)=r_{0}sec(varphi -gamma).}

Caso contrário, (R0,γ γ )(r_{0},gamma)} é o ponto em que o tangente se cruza o círculo imaginário do raio R0Não. r_{0}}
Rosa polar

Uma rosa polar com equação
R(φ) = 2 pecado 4φUma rosa polar é uma curva matemática que se parece com uma flor com pétalas e que pode ser expressa como uma equação polar simples,
R(φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =ume (kφ φ +γ γ 0){displaystyle r(varphi)=acos left(kvarphi +gamma _{0}right)}

para qualquer constante γ0 (incluindo 0). Se k for um número inteiro, essas equações produzirão uma rosa com k pétalas se k for ímpar, ou 2k se k for par. Se k for racional, mas não um número inteiro, uma forma semelhante a uma rosa pode se formar, mas com pétalas sobrepostas. Observe que essas equações nunca definem uma rosa com 2, 6, 10, 14 etc. pétalas. A variável a representa diretamente o comprimento ou amplitude das pétalas da rosa, enquanto k refere-se à sua frequência espacial. A constante γ0 pode ser considerada como um ângulo de fase.
Espiral arqueada
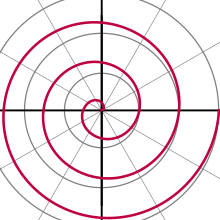
Um braço de uma espiral arqueéia com equação
R(φ) = φ / 2D para
0 < φ < 6DPai! A espiral arquimediana é uma espiral descoberta por arquimedes que também pode ser expressa como uma simples equação polar. É representado pela equação
R(φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =um+b)φ φ .{displaystyle r(varphi)=a+bvarphi.}

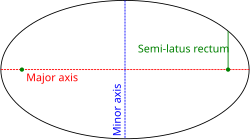
Ellipse, mostrando semi-latus rectum
Seções cônicas
Uma seção cônica com um foco no pólo e o outro em algum lugar no raio 0° (de modo que o eixo maior da cônica esteja ao longo do eixo polar) é dada por:
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Eu... Eu... 1- Sim. - Sim. ee φ φ Não. R=Ligação {1-ecos varphi)

 e > 1e = 1e < 1e = 0Eu... Eu... - Sim.
e > 1e = 1e < 1e = 0Eu... Eu... - Sim.Interseção de duas curvas polares
Os gráficos de duas funções polares R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =f(θ θ ){displaystyle r=f(theta)} e R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =g(θ θ ){displaystyle r=g(theta)}
e R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =g(θ θ ){displaystyle r=g(theta)} ter interseções possíveis de três tipos:
ter interseções possíveis de três tipos:
- Na origem, se as equações f(θ θ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0[displaystyle f(theta)=0}
 e g(θ θ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0{displaystyle g(theta)=0}
e g(θ θ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =0{displaystyle g(theta)=0} tem pelo menos uma solução cada.
tem pelo menos uma solução cada. - Todos os pontos Não.g(θ θ Eu...),θ θ Eu...]{displaystyle [g(theta _{i}),theta _{i}]}]}
![[g(theta _{i}),theta _{i}]](https://wikimedia.org/api/rest_v1/media/math/render/svg/8c3942e962cea54fd104a33ebac17dde8bffa819) Onde? θ θ Eu...{displaystyle theta _{i}}
Onde? θ θ Eu...{displaystyle theta _{i}} são soluções para a equação f(θ θ +2kD D )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =g(θ θ ){displaystyle f(theta +2kpi)=g(theta)}
são soluções para a equação f(θ θ +2kD D )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =g(θ θ ){displaystyle f(theta +2kpi)=g(theta)} Onde? kNão.
Onde? kNão. é um inteiro.
é um inteiro. - Todos os pontos Não.g(θ θ Eu...),θ θ Eu...]{displaystyle [g(theta _{i}),theta _{i}]}]} Onde? θ θ Eu...{displaystyle theta _{i}} são soluções para a equação f(θ θ +(2k+1)D D )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =- Sim. - Sim. g(θ θ ){displaystyle f(theta +(2k+1)pi)=-g(theta)}
 Onde? kNão. é um inteiro.
Onde? kNão. é um inteiro.
Cálculo
O cálculo pode ser aplicado a equações expressas em coordenadas polares.
A coordenada angular φ é expressa em radianos ao longo desta seção, que é a escolha convencional ao fazer cálculos.
Cálculo diferencial
Usando x = r cos φ e y = r sin φ, pode-se derivar uma relação entre derivadas em coordenadas cartesianas e polares. Para uma dada função, u(x,y), segue-se que (calculando suas derivadas totais)
ou
RDuDR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R∂ ∂ u∂ ∂ xe φ φ +R∂ ∂ u∂ ∂ Sim.pecado φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =x∂ ∂ u∂ ∂ x+Sim.∂ ∂ u∂ ∂ Sim.,DuDφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =- Sim. - Sim. ∂ ∂ u∂ ∂ xRpecado φ φ +∂ ∂ u∂ ∂ Sim.Re φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =- Sim. - Sim. Sim.∂ ∂ u∂ ∂ x+x∂ ∂ u∂ ∂ Sim..{displaystyle {begin{aligned}r{frac {du}{dr}}=r{frac {partial u}{partial x}}cos varphi +r{fracal y}}partial u}{fracal y}}partialpartial={fracal}
![{displaystyle {begin{aligned}r{frac {du}{dr}}&=r{frac {partial u}{partial x}}cos varphi +r{frac {partial u}{partial y}}sin varphi =x{frac {partial u}{partial x}}+y{frac {partial u}{partial y}},\[2pt]{frac {du}{dvarphi }}&=-{frac {partial u}{partial x}}rsin varphi +{frac {partial u}{partial y}}rcos varphi =-y{frac {partial u}{partial x}}+x{frac {partial u}{partial y}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01d876b55918333fa5b3792a72f5254b82b86c63)
Assim, temos as seguintes fórmulas:
RDDR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =x∂ ∂ ∂ ∂ x+Sim.∂ ∂ ∂ ∂ Sim.DDφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =- Sim. - Sim. Sim.∂ ∂ ∂ ∂ x+x∂ ∂ ∂ ∂ Sim..- Não. {d}{dr}&=x{frac - Não. x}}+y{frac {partial }{partial y}}[2pt]{frac {d}{dvarphi }}&=-y{frac {partial }{partial x}}+x{frac {partial }{partial y}}.end{aligned}}}
![{displaystyle {begin{aligned}r{frac {d}{dr}}&=x{frac {partial }{partial x}}+y{frac {partial }{partial y}}\[2pt]{frac {d}{dvarphi }}&=-y{frac {partial }{partial x}}+x{frac {partial }{partial y}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9f6d6d1a9e05c093275ecaf66033a4298e41fe1d)
Usando a transformação de coordenadas inversas, uma relação recíproca análoga pode ser derivada entre as derivadas. Dada uma função u(r,φ), segue que
DuDx= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∂ ∂ u∂ ∂ R∂ ∂ R∂ ∂ x+∂ ∂ u∂ ∂ φ φ ∂ ∂ φ φ ∂ ∂ x,DuDSim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∂ ∂ u∂ ∂ R∂ ∂ R∂ ∂ Sim.+∂ ∂ u∂ ∂ φ φ ∂ ∂ φ φ ∂ ∂ Sim.,{displaystyle {begin{aligned}{frac {du}{dx}}&={frac {partial u}{partial r}}{frac {partial r}{partial x}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial x}},[2pt]{frac {du}{dy}}&={frac {partial u}{partial r}}{frac {partial r}{partial y}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial y}},end{aligned}}}
![{displaystyle {begin{aligned}{frac {du}{dx}}&={frac {partial u}{partial r}}{frac {partial r}{partial x}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial x}},\[2pt]{frac {du}{dy}}&={frac {partial u}{partial r}}{frac {partial r}{partial y}}+{frac {partial u}{partial varphi }}{frac {partial varphi }{partial y}},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f446e4f0df07ead889d7039cec3301472fc1f9ea)
DuDx= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∂ ∂ u∂ ∂ Rxx2+Sim.2- Sim. - Sim. ∂ ∂ u∂ ∂ φ φ Sim.x2+Sim.2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =e φ φ ∂ ∂ u∂ ∂ R- Sim. - Sim. 1Rpecado φ φ ∂ ∂ u∂ ∂ φ φ ,DuDSim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∂ ∂ u∂ ∂ RSim.x2+Sim.2+∂ ∂ u∂ ∂ φ φ xx2+Sim.2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =pecado φ φ ∂ ∂ u∂ ∂ R+1Re φ φ ∂ ∂ u∂ ∂ φ φ .{displaystyle {begin{aligned}{frac {du}{dx}}&={frac {partial u}{partial r}}{frac {x}{sqrt {x^{2}+y^{2}}}} -{frac - Não. varphi }}{frac {y}{x^{2}+y^{2}}}\[2pt]&=cos varphi {frac {partial u}{partial r}}-{frac {1}{r}}sin varphi {frac {partial u}{partial varphi }},\[2pt]{frac {du}{dy}}&={frac - Não. r}}{frac (y){sqrt (x^{2}+y^{2}}+{frac - Não.: frac {x}{x^{2}+y^{2}}}\[2pt]&=sin varphi {frac {partial u}{partial r}}+{frac {1}{r}}cos varphi {frac {partial u}{partial varphi }}.end{aligned}}}
![{displaystyle {begin{aligned}{frac {du}{dx}}&={frac {partial u}{partial r}}{frac {x}{sqrt {x^{2}+y^{2}}}}-{frac {partial u}{partial varphi }}{frac {y}{x^{2}+y^{2}}}\[2pt]&=cos varphi {frac {partial u}{partial r}}-{frac {1}{r}}sin varphi {frac {partial u}{partial varphi }},\[2pt]{frac {du}{dy}}&={frac {partial u}{partial r}}{frac {y}{sqrt {x^{2}+y^{2}}}}+{frac {partial u}{partial varphi }}{frac {x}{x^{2}+y^{2}}}\[2pt]&=sin varphi {frac {partial u}{partial r}}+{frac {1}{r}}cos varphi {frac {partial u}{partial varphi }}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8dcc66ee6a6250cc206f488bb56f976a9a8bd2e8)
Assim, temos as seguintes fórmulas:
DDx= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =e φ φ ∂ ∂ ∂ ∂ R- Sim. - Sim. 1Rpecado φ φ ∂ ∂ ∂ ∂ φ φ DDSim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =pecado φ φ ∂ ∂ ∂ ∂ R+1Re φ φ ∂ ∂ ∂ ∂ φ φ .- Sim. {d}{dx}}&=cos varphi {frac {partial} ? r}}-{frac {1}{r}}sin varphi {frac {partial }{partial varphi }}\[2pt]{frac {d}{dy}}&=sin varphi {frac {particular} ? r}}+{frac {1}{r}}cos varphi {frac {partial }{partial varphi }}.end{aligned}}}
![{displaystyle {begin{aligned}{frac {d}{dx}}&=cos varphi {frac {partial }{partial r}}-{frac {1}{r}}sin varphi {frac {partial }{partial varphi }}\[2pt]{frac {d}{dy}}&=sin varphi {frac {partial }{partial r}}+{frac {1}{r}}cos varphi {frac {partial }{partial varphi }}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a08bfe016a4d8e15a933032d077bcdf8c49d41e)
Para encontrar a inclinação cartesiana da linha tangente a uma curva polar r(φ) em qualquer ponto, a curva é primeiro expressa como um sistema de equações paramétricas.
x= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R(φ φ )e φ φ Sim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R(φ φ )pecado φ φ {displaystyle {begin{aligned}x&=r(varphi)cos varphi \y&=r(varphi)sin varphi end{aligned}}}

A diferenciação de ambas as equações em relação a φ resulta
DxDφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R?(φ φ )e φ φ - Sim. - Sim. R(φ φ )pecado φ φ DSim.Dφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R?(φ φ )pecado φ φ +R(φ φ )e φ φ .{displaystyle {begin{aligned}{frac {dx}{dvarphi }}&=r'(varphi)cos varphi -r(varphi)sin varphi \[2pt]{frac {dy}{dvarphi }}&=r'(varphi)sin varphi +r(varphi)cos varphi.}}.
![{displaystyle {begin{aligned}{frac {dx}{dvarphi }}&=r'(varphi)cos varphi -r(varphi)sin varphi \[2pt]{frac {dy}{dvarphi }}&=r'(varphi)sin varphi +r(varphi)cos varphi.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/341713e0b0d484e169fb6cc867ab6a6e31b7ca65)
A divisão da segunda equação pela primeira resulta na inclinação cartesiana da reta tangente à curva no ponto (r(φ), φ):
DSim.Dx= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R?(φ φ )pecado φ φ +R(φ φ )e φ φ R?(φ φ )e φ φ - Sim. - Sim. R(φ φ )pecado φ φ .{displaystyle {frac {dy}{dx}}={frac {r'(varphi)sin varphi +r(varphi)cos varphi }{r'(varphi)cos varphi -r(varphi)sin varphi Sim.

Para outras fórmulas úteis, incluindo divergência, gradiente e laplaciano em coordenadas polares, consulte coordenadas curvilíneas.
Cálculo integral (comprimento do arco)
O comprimento do arco (comprimento de um segmento de linha) definido por uma função polar é encontrado pela integração sobre a curva r(φ). Seja L o comprimento ao longo da curva começando dos pontos A até o ponto B, onde esses pontos correspondem a φ = a e φ = b tal que 0 < b − a < 2π. O comprimento de L é dado pela seguinte integral
L= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∫ ∫ umb)Não.R(φ φ )]2+Não.DR(φ φ )Dφ φ ]2Dφ φ {displaystyle L=int _{a}^{b}{sqrt {left[r(varphi)right]^{2}+left[{tfrac {dr(varphi)}{dvarphi }}right]^{2}}}dvarphi }
![{displaystyle L=int _{a}^{b}{sqrt {left[r(varphi)right]^{2}+left[{tfrac {dr(varphi)}{dvarphi }}right]^{2}}}dvarphi }](https://wikimedia.org/api/rest_v1/media/math/render/svg/34f62c06ac2868b9ac160abe1e75a075cad9e261)
Cálculo integral (área)

A região de integração
R é limitado pela curva
R(
φ) e os raios
φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =
um e
φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =
b).
Seja R a região delimitada por uma curva r(φ) e os raios φ = a e φ = b, onde 0 < b − a ≤ 2π. Então, a área de R é
12∫ ∫ umb)Não.R(φ φ )]2Dφ φ .{displaystyle {frac {1}{2}}int _{a}^{b}left[r(varphi)right]^{2},dvarphi.}
![{displaystyle {frac {1}{2}}int _{a}^{b}left[r(varphi)right]^{2},dvarphi.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9fc7958a00360514f36fabcac7cab0361c2ae068)

A região
R é aproximado por
n sectores (aqui,
n = 5).

Um planímetro, que calcula mecanicamente integrais polares
Este resultado pode ser encontrado da seguinte forma. Primeiro, o intervalo [a, b] é dividido em n subintervalos, onde n é algum número inteiro positivo. Assim, Δφ, a medida do ângulo de cada subintervalo, é igual a b − a (a medida do ângulo total do intervalo), dividido por n, o número de subintervalos. Para cada subintervalo i = 1, 2,..., n, seja φi seja o ponto médio do subintervalo e construa um setor com o centro no pólo, raio r(φi ), ângulo central Δφ e comprimento do arco r(φi)Δφ. A área de cada setor construído é, portanto, igual a
Não.R(φ φ Eu...)]2D D )) ? ? φ φ 2D D = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =12Não.R(φ φ Eu...)]2? ? φ φ .{displaystyle left[r(varphi _{i})right]^{2}pi cdot {frac - Não. }}={frac {1}{2}}left[r(varphi _{i})right]^{2}Delta varphi.}
![{displaystyle left[r(varphi _{i})right]^{2}pi cdot {frac {Delta varphi }{2pi }}={frac {1}{2}}left[r(varphi _{i})right]^{2}Delta varphi.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ec0cb32735f6a73076e1db62726c0eace3f000f6)
Gerenciamento Gerenciamento Eu...= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =1n12R(φ φ Eu...)2? ? φ φ .{displaystyle sum _{i=1}^{n}{tfrac {1}{2}}r(varphi _{i})^{2},Delta varphi.}

À medida que o número de subintervalos n aumenta, a aproximação da área melhora. Tomando n → ∞, a soma se torna a soma de Riemann para a integral acima.
Um dispositivo mecânico que calcula integrais de área é o planímetro, que mede a área de figuras planas traçando-as: isso replica a integração em coordenadas polares adicionando uma junta para que a ligação de 2 elementos afete o teorema de Green, convertendo a integral polar quadrática em uma integral linear.
Generalização
Usando coordenadas cartesianas, um elemento de área infinitesimal pode ser calculado como dA = dx dy. A regra de substituição para integrais múltiplas afirma que, ao usar outras coordenadas, o determinante jacobiano da fórmula de conversão de coordenadas deve ser considerado:
JJ= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =- Não.∂ ∂ (x,Sim.)∂ ∂ (R,φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =|∂ ∂ x∂ ∂ R∂ ∂ x∂ ∂ φ φ ∂ ∂ Sim.∂ ∂ R∂ ∂ Sim.∂ ∂ φ φ |= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =|e φ φ - Sim. - Sim. Rpecado φ φ pecado φ φ Re φ φ |= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =Re2 φ φ +Rpecado2 φ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R.Não. J=det {partial (x,y)}{partial (r,varphi)}}={begin{vmatrix}{frac {partial x}{partial r}}&{frac {partial x}{partial varphi }}[2pt]{frac {partial y}{partial r}}&{frac }}end{vmatrix}}={begin{vmatrix}cos varphi &-rsin varphi \\sin varphi &rcos varphi end{vmatrix}}=rcos ^{2}varphi +rsin ^{2}varphi =r.}
![{displaystyle J=det {frac {partial (x,y)}{partial (r,varphi)}}={begin{vmatrix}{frac {partial x}{partial r}}&{frac {partial x}{partial varphi }}\[2pt]{frac {partial y}{partial r}}&{frac {partial y}{partial varphi }}end{vmatrix}}={begin{vmatrix}cos varphi &-rsin varphi \sin varphi &rcos varphi end{vmatrix}}=rcos ^{2}varphi +rsin ^{2}varphi =r.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52a1293fcb0e90b77017c0d9176c62aa06615b9b)
Portanto, um elemento de área em coordenadas polares pode ser escrito como
DA= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =DxDSim.= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =JJDRDφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RDRDφ φ .{displaystyle dA=dx,dy =J,dr,dvarphi =r,dr,dvarphi.}

Agora, uma função, que é dada em coordenadas polares, pode ser integrada da seguinte forma:
∫ ∫ ∫ ∫ Rf(x,Sim.)DA= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∫ ∫ umb)∫ ∫ 0R(φ φ )f(R,φ φ )RDRDφ φ .{displaystyle iint _{R}f(x,y),dA=int _{a}^{b}int _{0}^{r(varphi)}f(r,varphi),r,dr,dvarphi.}

Aqui, R é a mesma região acima, ou seja, a região delimitada por uma curva r(φ) e os raios φ = a e φ = b. A fórmula para a área de R é recuperada tomando f identicamente igual a 1.

Um gráfico de
f(x)= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =e- Sim. - Sim. x2{displaystyle f(x)=e^{-x^{2}}}
e a área entre a função e a
xNão.
-axis, que é igual a
D D - Sim.)
.
Uma aplicação mais surpreendente desse resultado produz a integral gaussiana:
∫ ∫ - Sim. - Sim. ∞ ∞ ∞ ∞ e- Sim. - Sim. x2Dx= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =D D .{displaystyle int _{-infty }^{infty }e^{-x^{2}},dx={sqrt Sim.

Cálculo vetorial
O cálculo do vetor também pode ser aplicado a coordenadas polares. Para um movimento planar, deixe R- Sim. ser o vetor de posição (R O que é?φ), R pecado(φ), com R e φ dependendo do tempo ).
ser o vetor de posição (R O que é?φ), R pecado(φ), com R e φ dependendo do tempo ).
Definimos os vetores unitários
R^ ^ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(e (φ φ ),pecado (φ φ )){displaystyle {hat {mathbf {r} }}=(cos(varphi),sin(varphi)}

φ φ ^ ^ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(- Sim. - Sim. pecado (φ φ ),e (φ φ ))= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =k^ ^ × × R^ ^ ,(-sin(varphi),cos(varphi)={hat {mathbf {k} }}times {hat {mathbf {r} - Sim.


Então
R= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(x,Sim.)= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R(e φ φ ,pecado φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RR^ ^ ,R:: = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(x:: ,Sim.:: )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R:: (e φ φ ,pecado φ φ )+Rφ φ :: (- Sim. - Sim. pecado φ φ ,e φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R:: R^ ^ +Rφ φ :: φ φ ^ ^ ,R" " = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(x" " ,Sim." " )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R" " (e φ φ ,pecado φ φ )+2R:: φ φ :: (- Sim. - Sim. pecado φ φ ,e φ φ )+Rφ φ " " (- Sim. - Sim. pecado φ φ ,e φ φ )- Sim. - Sim. Rφ φ :: 2(e φ φ ,pecado φ φ )= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(R" " - Sim. - Sim. Rφ φ :: 2)R^ ^ +(Rφ φ " " +2R:: φ φ :: )φ φ ^ ^ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(R" " - Sim. - Sim. Rφ φ :: 2)R^ ^ +1RDD)(R2φ φ :: )φ φ ^ ^ .{displaystyle begin{aligned}mathbf {r} &=(x, y)=r(cos varphi\sin varphi)=r{hat {mathbf {r} }}\{dot {r} } vardot {y}}right)={dot {r} }}+r{dot {varphi }}{hat {boldsymbol {varphi }}}\{ddot {mathbf {r} }}&=left({ddot {x}}ddot {y}}right)\varphir=sin vardotphi)+2{dot }}+left(r{ddot) {varphi }}+2{dot {r}}{dot {varphi }}right) }}}\&=left({ddot {r}}-r{dot {varphi }}^{2}right){hat {mathbf {r} }}+{frac {1}{r}};{frac {d}{dt}}left(r^{2}{dot {varphi }}right){hat {boldsymbol {varphi }}}end{aligned}}}

Esta equação pode ser obtida tomando derivada da função e derivadas dos vetores de base unitária.
Para uma curva em 2D com o parâmetro é θ θ - Sim. a equação anterior simplifica para:
a equação anterior simplifica para:
R→ → = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =R(θ θ )e^ ^ RDR→ → Dθ θ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =DRDθ θ e^ ^ R+Re^ ^ θ θ D2R→ → Dθ θ 2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(D2RDθ θ 2- Sim. - Sim. R)e^ ^ R+DRDθ θ e^ ^ θ θ {displaystyle {begin{aligned}{vec {r}}&=r(theta){hat {e}}_{r}\{frac O que é isso? }}&={frac {dr}{dtheta) {e}}_{r}+r{hat Não. }\ {d^{2}{vec {r}}}{dtheta ^{2}}}&=left({frac {d^{2}r}{dtheta ^{2}}}-rright){hat {e}}_{r}+{frac - Não. {hat {e}}_{theta }end{aligned}}}

Termos centrífugos e Coriolis
Vetor de posição R, sempre aponta radialmente da origem.
Vetor de velocidade v, sempre tangente ao caminho do movimento.
Vetor de aceleração um, não paralelo ao movimento radial, mas compensado pelas acelerações angulares e Coriolis, nem tangente ao caminho, mas compensado pelas acelerações centrípetas e radiais.
Vetores kinemáticos em coordenadas polares planas. Observe que a configuração não é restrita ao espaço 2d, mas um plano em qualquer dimensão superior.
O termo Rφ φ :: 2{displaystyle r{dot} }}^{2}} é por vezes referido como o aceleração centrípeta, e o termo 2R:: φ φ :: {displaystyle 2{dot {r}}{dot {varphi)
é por vezes referido como o aceleração centrípeta, e o termo 2R:: φ φ :: {displaystyle 2{dot {r}}{dot {varphi) como o Aceleração de Coriolis. Por exemplo, veja Shankar.
como o Aceleração de Coriolis. Por exemplo, veja Shankar.
Nota: estes termos, que aparecem quando a aceleração é expressa em coordenadas polares, são uma consequência matemática da diferenciação; eles aparecem sempre que coordenadas polares são usadas. Na dinâmica de partículas planares, essas acelerações aparecem ao configurar a segunda lei de movimento de Newton em um referencial rotativo. Aqui, esses termos extras são freqüentemente chamados de forças fictícias; fictícios porque são simplesmente o resultado de uma mudança no referencial de coordenadas. Isso não significa que eles não existam, ao contrário, eles existem apenas no quadro rotativo.
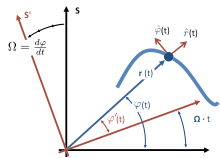
Quadro inercial de referência
S e quadro de co-rotação instantânea não inercial de referência
S.. O quadro de co-rotação gira à taxa angular Ω igual à taxa de rotação da partícula sobre a origem da
S. no momento particular
). Particle está localizado na posição vetorial
R(
)) e vetores unitários são mostrados na direção radial para a partícula da origem, e também na direção do ângulo crescente
φ normal para a direção radial. Esses vetores unitários não precisam estar relacionados ao tangente e normal ao caminho. Além disso, a distância radial
R não precisa estar relacionado com o raio da curvatura do caminho.
Frame co-rotativa
Para uma partícula em movimento planar, uma abordagem para atribuir significado físico a esses termos é baseada no conceito de uma referência de co-rotação instantânea. Para definir um referencial co-rotativo, primeiro uma origem é selecionada a partir da qual a distância r(t) para a partícula é definida. Estabelece-se um eixo de rotação perpendicular ao plano de movimento da partícula, passando por esta origem. Então, no momento selecionado t, a taxa de rotação do quadro co-rotativo Ω é feita para coincidir com a taxa de rotação da partícula sobre este eixo, dφ/ dt. Em seguida, os termos da aceleração no referencial inercial são relacionados aos do referencial co-rotativo. Seja a localização da partícula no referencial inercial (r(t), φ(t)), e no referencial co-rotativo ser (r′(t), φ′(t)). Como o referencial em corrotação gira na mesma taxa que a partícula, dφ′/dt = 0. A força centrífuga fictícia no referencial em corrotação é mrΩ2, radialmente para fora. A velocidade da partícula no quadro de co-rotação também é radialmente para fora, porque dφ′/dt = 0. A força de Coriolis fictícia portanto tem um valor −2m(dr/dt)Ω, apontado apenas na direção crescente φ. Assim, usando essas forças na segunda lei de Newton encontramos:
F+FÇ+FCor= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =mR" " ,- Não. {F}}+ {F}}_{text{cf}}+{boldsymbol {F}}_{text{Cor}}=m{ddot - Sim.

FR+mRΩ Ω 2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =mR" " Fφ φ - Sim. - Sim. 2mR:: Ω Ω = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =mRφ φ " " ,{displaystyle {begin{aligned}F_{r}+mrOmega ^{2}&=m{ddot {r}}F_{varphi - Sim. (r) Omega &=mr{ddot {varphi }}end{aligned}}}

FR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =mR" " - Sim. - Sim. mRφ φ :: 2Fφ φ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =mRφ φ " " +2mR:: φ φ :: .{displaystyle {begin{aligned}F_{r}&=m{ddot {r}}-mr{dot }}^{2}\F_{varphi }&=mr{ddot {varphi }}+2m{dot {r}}{dot {varphi }}.end{aligned}}}

Esta comparação, mais o reconhecimento de que pela definição do referencial em co-rotação no tempo t ele tem uma taxa de rotação Ω = dφ/dt , mostra que podemos interpretar os termos da aceleração (multiplicada pela massa da partícula) encontrada no referencial inercial como o negativo das forças centrífuga e de Coriolis que seriam vistas no instantâneo, não inercial quadro co-rotativo.
Para o movimento geral de uma partícula (em oposição ao movimento circular simples), as forças centrífuga e de Coriolis no quadro de referência de uma partícula geralmente são referidas ao círculo ósculo instantâneo de seu movimento, não a um centro fixo de coordenadas polares. Para mais detalhes, veja força centrípeta.
Geometria diferencial
Na terminologia moderna da geometria diferencial, as coordenadas polares fornecem gráficos de coordenadas para a variedade diferenciável R2 {(0,0)}, o plano menos a origem. Nessas coordenadas, o tensor métrico euclidiano é dado por
DS2= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =DR2+R2Dθ θ 2.Não. ds^{2}=dr^{2}+r^{2}dtheta ^{2}.}

eR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =∂ ∂ ∂ ∂ R,eθ θ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =1R∂ ∂ ∂ ∂ θ θ ,Não. e_{r}={frac {partial }{partial r}},quad e_{theta }={frac {1}{r}}{frac {partial }{partial theta }}}

eR= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =DR,eθ θ = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =RDθ θ .{displaystyle e^{r}=dr,quad e^{theta }

ω ω Eu...JJ= = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = = =(0- Sim. - Sim. Dθ θ Dθ θ 0){displaystyle {omega ^{i}}_{j}={begin{pmatrix}0&-dtheta \dtheta &0end{pmatrix}}}

Extensões em 3D
O sistema de coordenadas polares é estendido em três dimensões com dois sistemas de coordenadas diferentes, o sistema de coordenadas cilíndricas e esféricas.
Aplicativos
As coordenadas polares são bidimensionais e, portanto, podem ser usadas apenas onde as posições dos pontos estão em um único plano bidimensional. Eles são mais apropriados em qualquer contexto em que o fenômeno considerado esteja inerentemente ligado à direção e ao comprimento de um ponto central. Por exemplo, os exemplos acima mostram como as equações polares elementares são suficientes para definir curvas – como a espiral arquimediana – cuja equação no sistema de coordenadas cartesianas seria muito mais complicada. Além disso, muitos sistemas físicos – como aqueles relacionados com corpos que se movem em torno de um ponto central ou com fenômenos originados de um ponto central – são mais simples e intuitivos de modelar usando coordenadas polares. A motivação inicial para a introdução do sistema polar foi o estudo do movimento circular e orbital.
Posição e navegação
Coordenadas polares são usadas com frequência na navegação, pois o destino ou direção da viagem pode ser dado como um ângulo e distância do objeto sendo considerado. Por exemplo, as aeronaves usam uma versão ligeiramente modificada das coordenadas polares para navegação. Nesse sistema, aquele geralmente usado para qualquer tipo de navegação, o raio 0° é geralmente chamado de proa 360, e os ângulos continuam no sentido horário, e não no sentido anti-horário, como no sistema matemático. A posição 360 corresponde ao norte magnético, enquanto as posições 90, 180 e 270 correspondem ao leste magnético, sul e oeste, respectivamente. Assim, uma aeronave viajando 5 milhas náuticas para leste estará viajando 5 unidades na proa 90 (leia zero-nove-zero pelo controle de tráfego aéreo).
Modelagem
Sistemas que exibem simetria radial fornecem configurações naturais para o sistema de coordenadas polares, com o ponto central atuando como pólo. Um excelente exemplo desse uso é a equação de fluxo de água subterrânea quando aplicada a poços radialmente simétricos. Sistemas com força radial também são bons candidatos para o uso do sistema de coordenadas polares. Esses sistemas incluem campos gravitacionais, que obedecem à lei do quadrado inverso, bem como sistemas com fontes pontuais, como antenas de rádio.
Sistemas radialmente assimétricos também podem ser modelados com coordenadas polares. Por exemplo, o padrão de captação de um microfone ilustra sua resposta proporcional a um som vindo de uma determinada direção e esses padrões podem ser representados como curvas polares. A curva para um microfone cardióide padrão, o microfone unidirecional mais comum, pode ser representada como r = 0,5 + 0,5sin(ϕ) em sua frequência de design de destino. O padrão muda para omnidirecionalidade em frequências mais baixas.
Más resultados...









.svg)





.svg)



